XiaoMi-AI文件搜索系统
World File Search SystemArd

公司简介
Andrea Corbetta Banca Sella Gruppo Obi Motorola Barabas GQ -Conde Nast Mtdm ST Microelectronics Beaute Prestige Prestige International Guzzi MT Swarovski Benelli -Beretta benelli -Beretta诺基亚testori caterpillar om -fiat timberland caudalie caudalie ollandinotti tiscali tiscali cielo cielo venezia lmmobil中心orsingher ortu avocati tod tod tod tod to to Ard Trunk&Co欧洲社区LTACA PIAGGIO UNESCO CONSORZIO VALTELLINA这很酷Job Pilot Playteam 江诗丹顿 德意志银行 Kiton Poliedro Valtur Di Biz Co 柯达 Pomellato Velasco Vitali DPR 九龙明信片 Virgilio DUPONT Lancaster Progetto CMR Virgin ENEL La Ristosalumeria Publicontrol Vodafone ENIT Lega Calcio Radio e Video Italia SMI Westone Exytus Levi's Ragno Whirlpool Eyepetizer LG 电子 Recarlo Zaf Fabbrica del Duomo Logan Regione Lombardia Zehjiang For D Home Furniture Federmobili Loro Piana

禁食,对阿尔茨海默氏病的潜在干预
房颤(AF)是全球医学实践中最常见的节奏之一[1]。传统,AF可以分为五种模式:首先被诊断出,阵发性,持久,长期持久和永久性AF [2]。AF患者患心力衰竭和中风的风险增加,导致严重的残疾和死亡[3]。糖尿病(DM)是AF的主要危险因素之一[4-6]。亚临床AF发作通常在2型糖尿病(T2DM)患者中频繁出现,并与血栓栓塞风险增加有关[7]。进一步,在使用DM的患者中,对AF的治疗似乎更具挑战性。与普通人群相比,DM的植物的AF消融结果较差,与非DM组相比,DM组的AR-Rhythmia复发率明显更高[8,9]。AF和DM目前都是全球著名的公共卫生问题[10]。但是,尚未完全研究DM中AF的基本机制。

可证明的安全性和应用程序的新限制
摘要。我们提供了新的结果,表明无法证明Elgamal加密是CCA1-Secure,这是密码学中长期存在的开放问题。我们的结果归功于基于非常广泛的基于元减少的不可能结果,这是与有效重新融合的证人的随机自我可重新相关关系。我们开发的技术首次允许为挑战者在安全游戏结束时输出新的挑战语句的非常弱的安全概念提供不可能的结果。这可以用来最终解决过去仍然难以捉摸的加密型定义。我们表明,我们的结果具有广泛的适用性,通过将几种已知的加密设置作为随机自我重新还原和可重新传递关系的实例。这些设置包括一般的半态PKE和大型认证的同型单向双向物种。结果,我们还为Paillier和Damg˚ard-jurik的IND-CCA1安全性获得了新的不可能结果,以及许多单人反转假设(例如一摩尔DLOG或一元RSA假设)。

后疫情时代,德国和波兰的经济关系会蓬勃发展吗?
自从 2004 年波兰加入欧盟以来,德国和波兰的经济关系就已迅速好转。近十年来,两国的经济关系持续以惊人的势头发展。自 1994 年以来,两国的贸易额增长了 12 倍。如今,波兰和德国之间非常活跃的经济交流可以说是两国关系稳定的重要支柱。德波经济关系中仍然存在的不对称现象正在逐渐减少。波兰是德国第五大供应国,波兰在德国的投资也日益重要。由于两国都无法抵御新冠病毒引发的经济衰退,现在的问题是,这场大流行将对双边贸易产生何种影响,以及两国能否继续沿着迄今为止非常成功的经济合作道路前进。

账单代码:5001-06 - 联邦公报
非 MDE:此请求还包括以下非 MDE 物项:八 (8) 个 AN/APN-194(V) 雷达高度计、八 (8) 个 AN/APN-217A 多普勒雷达导航装置、八 (8) 个 AN/ARN-15l (V)2 全球定位系统、八 (8) 个 AN/APX- 100(V) 敌我识别 (IFF) 应答器组、八 (8) 个 OA-8697 A/ARD 测向组、八 (8) 个 AN/ARN- 118(V) 导航接收器、八 (8) 个 AN/ARN-146 顶部位置指示器、十六 (16) 个 IP-1544A/ASQ-200 水平情况视频显示器 (HSVD)、八 (8) 个 AN/ARC-174A (V)2 HF 无线电、十六 (16) AN/ARC182(V) UHF/UHF 无线电、八 (8) PIN 70600-81010-011 通信系统控制器、八 (8) 挺 GAU-16 50 口径机枪、八 (8) 挺 M- 60D/M-240 机枪、八 (8) 个内部辅助油箱、十六 (16) 个外部辅助油箱和八 (8) 个 C-11822/AWQ 控制器、武器系统。还包括备件和维修零件、支持和测试设备、通信设备、渡轮支持、出版物和技术文档、美国政府和承包商工程、技术和后勤支持服务,以及其他相关的后勤和计划支持要素。
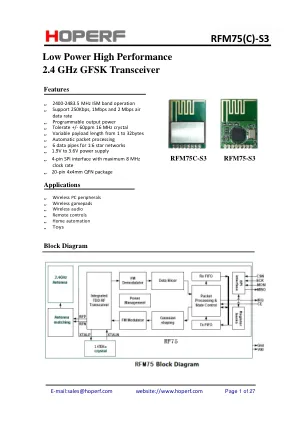
RF75用户手册
ACK Acknowledgement ARC Auto Retransmission Count ARD Auto Retransmission Delay CD Carrier Detection CE Chip Enable CRC Cyclic Redundancy Check CSN Chip Select Not DPL Dynamic Payload Length FIFO First-In-First-Out GFSK Gaussian Frequency Shift Keying GHz Gigahertz LNA Low Noise Amplifier IRQ Interrupt Request ISM Industrial-Scientific-Medical LSB Least Significant Bit MAX_RT Maximum Retransmit Mbps Megabit per second MCU Microcontroller Unit MHz Megahertz MISO Master In Slave Out MOSI Master Out Slave In MSB Most Significant Bit PA Power Amplifier PID Packet Identity Bits PLD Payload PRX Primary RX PTX Primary TX PWD_DWN Power Down PWD_UP Power Up RF_CH Radio Frequency Channel RSSI Received Signal Strength Indicator RX Receive RX_DR Receive Data Ready SCK SPI时钟SPI SPI串行外围接口TDD时间划分双面TX传输TX_DS发送数据发送XTAL CRYSTAL

FCIC 18010年作物保险手册(CIH)2025
变更参考描述para。1216基于CCIP和ARPI更改的经过修改的可保险种植要求。第1段。1216a(5)包括允许确定合同价格的生产协议。第1段。1217修改后的CCIP和ARPI不可保险的面积要求,以符合新的破坏和本机SOD政策更改。第1段。1219澄清的要求添加ARD之后发现的未报告的面积或未报告的单元。第1段。1232添加了有关CCIP的可接受面积报告修订的澄清。第1段。1232a(3)添加了有关面积报告修订的澄清,其中包括未报告的单位和/或未报告的面积。第1段。1232b(4)添加了有关Afipreage报告修订要求的注释。第1段。1232E(8)删除了先前的1232e(8)(a)(i)。第1段。1232E(10)在未经检查的情况下可以修订面积报告时,在情况下增加了未注明的面积,除非满足保险要求,否则它不会改变保单的责任。第1段。1303E(1)(e)在本年度生产报告外增加了新的精算要约的重新认证。第1段。1307和1328

在量子随机Oracle模型中HMAC和NMAC的紧密量子安全性
摘要。HMAC和NMAC是将Merkle-DamgLARD HASH函数转换为消息Au-thentication代码(MACS)或伪随机函数(PRFS)的最基本和重要结构。在Crypto 2017上,Song和Yun在标准假设下表明HMAC和NMAC是量子伪函数(QPRF),即潜在的压缩函数是QPRF。当HMAC和NMAC的输出长度为n位时,他们的证明可确保安全性高达O(2 N/ 5)或O(2 N/ 8)量子查询。但是,可证明的安全性约束与使用O(2 N/ 3)量子查询的简单区分攻击之间存在差距。本文解决了缩小差距的问题。我们表明,将HMAC或NMAC与随机函数区分开的量子查询数的紧密结合是量子随机甲骨文模型中的θ(2 n/ 3),其中压缩函数被建模为量子随机甲壳。基于Zhandry压缩甲骨文技术的替代形式化,给出紧密的量子绑定,我们引入了一种新的证明技术,重点是量子查询记录的对称性。

AAS 016独立危害评估和...
仪器发现(SHERIF)系统的独立危害评估是一组新型算法和相关的框架,旨在支持多个LIDAR扫描中的数字高程图(DEM)的产生,并执行HAX-ARD检测(HD)和安全位点识别(SSI),而没有依赖于其他板上的系统。Sherif可以使用几种技术在行星表面的不同激光扫描上执行强大的3D键提取和点云配准(PCR),以生成在轨迹过程中演变的DEM。该框架还支持各种危险检测和安全位点识别算法,这些算法可用于生产的不断发展的DEM。sherif具有强大而模块化的结构,使用户在选择和实施哪个关键点标识,PCR和HD/SSI算法时具有高度的挠性性,同时保持核心Sherif框架的数据产品和传感器独立性。Sherif最近通过在NASA Johnson太空中心的模拟和硬件实验测试进行了评估。