XiaoMi-AI文件搜索系统
World File Search SystemArms

武器的影响
美国印度的关系被描述为“ 21世纪的定义伙伴关系” - 在过去的二十年中,人们看到了急剧上升。1将印度视为具有“共享价值观”的“自然盟友”,从2005年开始,美国做出了巨大的努力,“帮助印度成为21世纪的主要世界大国”。 2为此,华盛顿试图提高新德里在全球秩序和国际机构,增强印度的武器能力和技术基础上的地位,并为军事歌剧造成互操作性。今天,印度被指定为与北约盟友相当的“主要国防伙伴”,APEX国家安全官员强调了“至关重要的”和“关键”印度对美国的战略是如何的,美国官员认为印度在该政府的印度 - 太平洋愿景中扮演着重要角色。” 3尽管美国拥抱了美国,但印度还是与俄罗斯的友谊和前所未有的“战略伙伴关系”,该国被美国明确认为是敌对的宾语对手和长期战略竞争对手。4
俄罗斯的武器
瓦西里·亚历山德罗夫 (Vasily Alexandrov),以 JSC ASTC 的名字命名的总经理。A.N.图波列夫” 尤里·安蒂波夫,国防综合体转型投资者协会副主席 安德烈·别利亚尼诺夫,联邦国家单一企业“俄罗斯国防出口公司”总经理 亚历山大·杰格加列夫,沃伊尼·帕拉德出版社总经理 阿纳托利·多尔戈拉普捷夫国防企业援助联盟主席韦尼亚明·埃夫雷莫夫(Veniamin Efremov),个人电脑“关注“安泰”的总设计师列昂尼德·伊瓦绍夫,俄罗斯联邦国防部内政部总局局长弗拉基米尔·基列耶夫,俄罗斯火箭炮兵科学院院长尤里·科普捷夫,俄罗斯航空航天局局长弗拉基米尔·科伦科夫俄罗斯联邦国家单一企业“玄武岩国家研究与生产企业”总经理阿纳托利·科尔努科夫,俄罗斯空军总司令弗拉基米尔·库罗耶多夫,俄罗斯海军总司令 尤里·马斯柳科夫 俄罗斯联邦国家杜马工业委员会主席 维克托·梅尔库洛夫 阿穆尔河畔共青城 APO 总指挥 谢尔盖·米赫耶夫 总裁、总设计师、总导演卡莫夫公司 Nikolay Nikitin,联邦国家单一企业“俄罗斯飞机制造”米格公司总经理兼总设计师 Alexander Nozdrachev俄罗斯常规武器局局长季诺维·帕克、俄罗斯弹药局局长米哈伊尔·波戈相扬、苏霍伊飞机生产联合体总经理、苏霍伊设计局局长弗拉基米尔·波斯佩洛夫、俄罗斯造船局局长斯坦尼斯拉夫·普罗什金 (Stanislav Proshkin),国家单一制企业中央研究所所长“Gidroribor” 格里戈里·拉波塔 (Grigory Rapota),工业、科学技术部第一副部长“仪器设计局”亚历山大Shlyakhtenko,中央海洋设计局“Almaz”总设计师

俄罗斯和武器贸易
2。COLD WAR国际武器的趋势转移16 Ian Anthony I.新的国际环境与武器贸易16 II。一般市场趋势19 III。改变经济状况24 iv。俄罗斯武器出口的模式28 V.对俄罗斯在世界军备市场的未来的评估33表2.1。来自苏联/俄罗斯的25个主要常规29武器的25个最大收件人,1980 - 96年,表2.2。苏联/俄罗斯的主要常规武器30最大的10大接受者,1982 - 96年表2.3。苏联不同武器类别的股票和31种传统武器出口,1980 - 96年图2.1。主要常规武器的交付,1980 - 96年19图2.2。美国主要常规武器交付的份额,20 1980 - 96图2.3。1980年,1987年和1996年的主要常规22武器交付的区域股份
未来的军备控制
这份报告标志着军备控制协会题为“明天的军备控制”项目的完成。这项工作是欧洲领导力网络项目的一部分,该项目由德国联邦外交部资助,名为“解开技术复杂性和核政策制定方法”。该协会的工作属于该项目的第四部分,题为“缓解战略和军备控制”。该协会的项目重点关注新的或现有的军备控制和降低风险措施,决策者可以提出和支持这些措施,以防止具有军事用途的新兴技术导致冲突或对抗演变为核战争。该项目于 2021 年 3 月至 2022 年 12 月进行。该协会举办了五次虚拟研讨会,每场都以选定的技术之一为中心,最后一场除外,它结合了无人机和致命的自主武器系统,共有 12 至 20 名参与者。参与者包括来自世界各地的前政府官员和外交官、政策专家和技术专家。每个研讨会分为两部分:一部分侧重于定义特定的技术能力以及该能力可能对战略稳定构成的风险,另一部分侧重于可能的军备控制和风险降低措施,以减轻已确定的风险。演讲结束后,与会者分成小组进行进一步的详细讨论。研讨会根据查塔姆宫规则进行。本报告反映了这些宝贵、信息丰富的讨论内容,协会对此深表感谢。

军备控制现代化:
Kerstin Vignard 目前领导 UNIDIR 团队,为最新的网络安全政府专家组主席和信息通信技术与国际安全不限成员名额工作组主席提供支持。她曾领导 UNIDIR 团队,为前四个网络政府专家组提供支持。从 2013 年到 2018 年,她建立并领导了 UNIDIR 关于日益自主的技术武器化的工作,该工作重点是通过细化关注领域、确定相关联系和学习其他相关领域(包括私营部门)的方法,推进关于武器化自主性的多边讨论。她是一名国际安全政策专家,在联合国拥有 25 年的经验,对国际安全政策和技术的结合点感兴趣。Vignard 的专业领域包括人工智能、自主技术、网络、技术创新和国际安全。在担任目前的特殊职务之前,Vignard 曾担任联合国裁军研究所副所长。
人工智能与军备控制
保罗·沙尔是 CNAS 的副总裁兼研究主任。他是获奖作品《无人军队:自主武器和战争的未来》的作者,该书获得了 2019 年科尔比奖,并被比尔·盖茨评为 2018 年五大畅销书之一。沙尔博士曾在布什和奥巴马政府的国防部长办公室工作,在制定无人和自主系统以及新兴武器技术政策方面发挥了主导作用。他领导的国防部工作组起草了国防部第 3000.09 号指令,制定了该部门的武器系统自主性政策。他拥有伦敦国王学院战争研究博士学位、圣路易斯华盛顿大学政治经济学和公共政策硕士学位以及物理学学士学位(优异成绩)。在国防部长办公室工作之前,沙雷曾担任陆军第 3 游骑兵营的步兵、狙击手和侦察队队长,并多次在伊拉克和阿富汗服役。他毕业于陆军空降兵、游骑兵和狙击手学校,并以优异成绩毕业于第 75 游骑兵团的游骑兵训练计划。
同情心 - 联合兵种中心
领导者有责任完成任务并改善组织,其中包括遵守陆军价值观和关心下属。同理心在领导者能力、沟通中起着关键作用,是有效领导的关键组成部分。▪ 塑造您的沟通方式 - 考虑对方的观点 ▪ 量身定制信息 - 在对方所在的地方与他们会面 ▪ 要求澄清 - 让他们详细说明 ▪ 解释 - 深化/确认您对情况的理解 ▪ 用语言表达 - 复制那种情感并表明您理解 ▪ 确认 - “我理解你为什么会有这种感觉!”
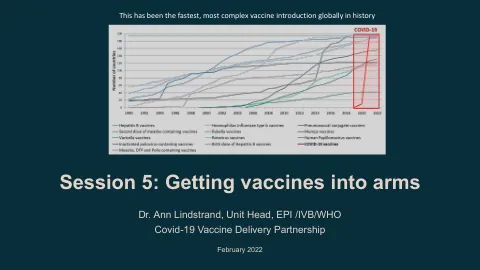
第五节:让疫苗走进人们的心中
政治背景和国内规划机制 • 领导和协调;缺乏供应可见性;多种产品、保质期短、冷链能力;数据和数据管理;相互竞争的优先事项。 融资 • 国家一级的 COVID-19 疫苗接种运营和疫苗购买需求预算不足;捐助方资金已承诺但到达国家的速度很慢,而且往往慢慢流向设施和一线供应商;一些国家不愿申请多边开发银行贷款,和/或没有时间和能力申请 GAVI 资金 需求和犹豫 • 对政府和卫生系统缺乏信任;无法进入疫苗接种点/不知道在哪里接种疫苗。 卫生人力 • 由于感染、死亡、隔离、劳工抗议和罢工以及 Covid 19 应对措施造成卫生人力流失;在疫情爆发之前就存在的严重人员短缺;缺乏 COVID-19 疫苗培训,导致卫生工作者犹豫不决。国内供应链 • 国家以下和地区层面的冷链能力不足,许多国家甚至没有超冷链能力。 数据系统 • 国家层面缺乏数据系统来确定接种资格、安排预约和跟踪疫苗接种状况;数据收集和报告不频繁(通常每月一次)。