XiaoMi-AI文件搜索系统
World File Search SystemBinocular

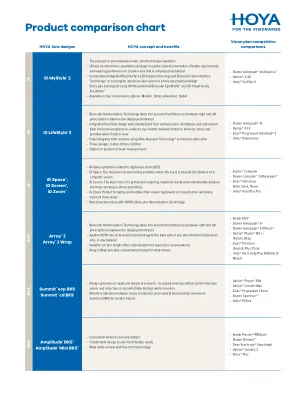
产品对比表 - HOYA Vision Care
©2024 HOYA Corporation。保留所有权利。Hoyalux iD MyStyle、Hoyalux iD LifeStyle、Hoyalux Array、Tact、Phoenix、Super HiVision、Super HiVision EX3、Sensity、View Protect、Hoyalux Summit、Recharge、HiVision、BKS Technology、Diamond Tint、Summit 和 Amplitude 是 HOYA Corporation 的注册商标。EX3+、iD Single Vision、Single Vision iQ、Sync III、Integrated Dual Surface、Integrated Dual Side、Binocular Harmonization Technology、View Xpansion Technology、Stabilight Technology、Binocular Eye Model、3D Visual Acuity Simulation、ST28 iQ、iD Space、iD Screen、iD Zoom、MySV、360° Visual Comfort、Meiryo、EX4、3D Binocular Vision 和 Visionary Alliance 是 HOYA Corporation 的商标。 Transitions、Transitions Signature、XTRActive 和 Vantage 是注册商标,Transitions 徽标是 Transitions Optical, Inc. 的商标,由 Transitions Optical Limited 授权使用。GEN 8 和 Light under control 是 Transitions Optical Limited 的注册商标。所有其他商标、注册商标和版权均归其各自所有者所有。04.24

Citation: Park J, Kim G, Rho J. Advancing depth perception in spatial computing with binocular metalenses. Opto-Electron Adv 8 , 240267(2025).
以前与传统镜头无法实现的那样。在深度感应应用中,元整日已被有效地应用于点扩散功能(PSF)Engiering 9和结构化光10、11,显示出很大的潜力,用于开发更紧凑,更有效的深度感知系统。随着对轻质和紧凑的深度相机的需求的增长,对基于跨表面的深度感知的研究加速了。在《光学科学》中发表的最新作品中12,X。Liu等。最近引入了一种开创性的双眼金属深度感知系统。这种紧凑而轻巧的解决方案有望增强下一代可穿戴设备,使我们更加接近更具实用和实用的空间计算体验。
海马 - 枕骨连通性反映了佛塔的自传记忆缺陷
1图像强度用于描述双眼竞争任务的结果,而精神成像的生动性用于描述VVIQ的结果。尽管这两个任务都是相关的,但VVIQ测量了生动,而双眼竞争任务的维度却没有明确定义。
产品对比表 - HOYA Vision Care
• 无限设计变化的个性化巅峰之作 • 利用交互式咨询程序收集患者信息、生活方式要求和佩戴偏好,以创建独特个性化的镜片 • 结合集成双面 (iD) 设计技术和双眼协调技术™ 实现理想的双眼视觉,实现真正个性化的设计 • 每一副都采用 HOYA 专利的双眼模型™ 和 3D 视觉敏锐度模拟™ 设计 • 提供四种便捷选项:现代、细节、冒险、稳定
半球视网膜由等离子光电子复制器模拟,并具有全光调制的神经形态立体视觉
双眼立体视觉依赖于两个半球视网膜之间的成像差异,这对于在三维环境中获取图像信息至关重要。因此,与生物眼的结构和功能相似性的视网膜形态电子始终非常需要发展立体视觉感知系统。在这项工作中,开发了基于Ag-Tio 2纳米簇/藻酸钠纤维的半球光电磁带阵列,以实现双眼立体视觉。由等离子热效应引起的全光调制和Ag-Tio 2纳米群体中的光激发,以实现像素内图像传感和存储。广泛的视野(FOV)和空间角度检测是由于设备的排列和半球形几何形状的入射角依赖性特征而在实验上证明的。此外,通过构造两个视网膜形态的恢复阵列,已经实现了基于双眼差异的深度感知和运动检测。这项工作中证明的结果提供了一种有希望的策略,以开发全面控制的回忆录,并促进具有传感器内架构的双眼视觉系统的未来发展。

城市运营传感器
3.6.1技术描述2 - 声传感器网络(3.7 on 5)3-5 3.6.2技术描述7 - 用于成像的便携式低成本雷达和3-6通信(2 on 5)3.6.3技术描述8 - 高光谱vnir/lwir:scopes/scopes/binocular/binocular,3-6 subeverance,3-6 Surveillance,sniper sectection,3。3. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6 on。 Doppler Radar for 3-7 Through-the-Wall-Sensing (3.3 on 5) 3.6.5 Technology Description 11 – Long Wavelength Infrared (LWIR) (4.4 on 5) 3-8 3.6.6 Technology Description 12 – Coherent Radar Through Wall System (3.7 on 5) 3-8 3.6.7 Technology Description 14 – Sensor System for Vehicle Situation Awareness 3-9 (4.4 on 5) 3.6.8 Technology Description 15 – Tunable THz Imager (4.1 on 5)3-9 3.6.9技术描述17 - 卡拉迪姆:无人看管的地面警报传感器(2 on 5)3-10 3.6.10技术描述18 - DAOTE:DAOTE:检测隐藏的3-10狙击手(3.7 on 5)3.6.6.11技术描述19 - PILAR:PILAR:PILAR:PILAR:OACOSTIC,SNIPERTIC 3.11 3-11 3-11 ON:传感器(1.9 on 5)3-11 3.6.13技术描述21 - 眼镜蛇:反电池雷达(4.1 on 5)3-12 3.6.14技术描述22 - 叶子渗透:叶子穿透(1 on 5)3-12 3.6.15技术说明37 - 短期生物百叶窗 - 短距离生物百叶窗(5)3.6.6.6.6.6.16技术范围38 – Spy and and and op and wowl(4. 38 – Spy and towr(4)。 3-13 3.6.17技术描述42 - 主动防御传感器系统(2.1 on 5)3-14

一种基于计算机的测量立体潜伏期的方法......
介绍 视觉深度感知(立体视觉)传统上是通过评估受试者可检测到的最小双眼视差来测试的。然而,事实表明,在日常生活中无法区分单眼和双眼视觉的受试者在视差测试中可能会得分较高(“立体视觉障碍”)。研究发现,产生视觉感知(立体延迟)所需的双眼测试刺激的最短持续时间与日常立体视觉障碍的相关性更高。我们描述了一种评估立体延迟的新方法,该方法不需要除个人计算机(PC)和一副 3D 眼镜(带绿色和红色镜片)以外的特殊仪器。材料和方法受试者舒适地坐在 IBM 兼容 PC 的屏幕前,戴着一副带绿色和红色滤光片(镜片)的 3c0 眼镜。计算机屏幕上以以下方式生成随机点立体图:最初只显示绿点,然后突然添加红点。并在屏幕上持续一段随机设定的可变时间(25-500 毫秒)。时间步长通常为 25 毫秒。每次三次持续 4 秒,双眼刺激总是在这个时间结束时出现。受试者在三次之后按下两个键之一以表示深度知觉的缺失或存在。能够引出 70% 或更多正确答案的最小呈现时间(每个时间步长重复 10 次)被记录为立体延迟。结果到目前为止,已有 7 名 24-45 岁的正常受试者接受了测试。一名受试者未通过测试,无法在任何时间步长上表现得比偶然情况更好。对于其余受试者,平均立体延迟为 250 毫秒(SD=25 毫秒)。结论这似乎是一种有效的、易于实施的协议,用于确定随机点立体图的立体延迟。目前正在改进该程序,以便更精确地测定最小立体潜伏期值,并使正常人和患有神经眼科疾病的患者的值标准化。

视觉过程改善对同侧偏盲患者的疗效
摘要 同侧偏盲是因中风、肿瘤、脑外伤和其他罕见原因引起的视野缺损。由于视觉系统受损,会出现侧向忽视,导致难以检测双眼视野一侧的物体,这使患者在日常活动中面临潜在危险,尤其是在户外交通中。已经开发出不同的光学辅助设备,如菲涅尔棱镜,通过增加受影响半视野的感知来帮助这些患者。这种棱镜矫正可以出现在各种配置中,例如:轭式棱镜、单眼和双眼扇形棱镜,底座朝向患侧。治疗这些患者的另一种选择是基于刺激受影响半视野的视觉训练。 关键词:同侧偏盲、视野丧失、棱镜矫正
自由航空 ppl/lapl 理论知识大纲
• 中枢、周围和自主神经系统 • 视觉:(a) 功能解剖学;(b) 视野、中央凹和周边视觉;(c) 双眼和单眼视觉;(d) 单眼视觉线索;(e) 夜视;(f) 视觉扫描和检测技术以及“观察”的重要性;(g) 视力缺陷。
大脑中感觉信息的转变表明优化标准的改变
整个大脑中的神经元会根据感觉输入有规律地调节其放电频率。神经计算理论认为,这些调节反映了受限优化的结果,其中神经元旨在稳健高效地表示感觉信息。然而,我们对这种优化在大脑不同区域如何变化的理解仍处于起步阶段。在这里,我们表明神经感觉反应沿着视觉系统的背流转变,其方式与从优化信息保存到优化感知辨别的转变一致。专注于双眼视差的表示(两只眼睛的视网膜图像的细微差异),我们重新分析了表征猕猴大脑区域 V1、V2 和 MT(中颞)神经调节曲线的测量值。我们使用 Fisher 信息框架将它们与自然行为中通常遇到的双眼视差统计数据进行比较。不同区域的调谐曲线特征的差异与优化目标的转变相一致:V1 和 V2 群体水平的反应更符合最大化编码的有关自然发生的双眼视差的信息,而 MT 反应则转向最大化支持视差辨别的能力。我们发现,调谐曲线向更大视差的转变是这种转变的关键驱动因素。这些结果为先前发现的皮质视差选择区域之间的差异提供了新的见解,并表明这些差异在支持视觉引导行为方面发挥着重要作用。我们的研究结果强调,在评估神经代码的最优性时,不仅需要考虑信息保存和神经资源,还需要考虑与行为的相关性。