XiaoMi-AI文件搜索系统
World File Search SystemCAMERA
IQ280 相机系统 - TASWIR
使用 iPad 或 iPhone 上的 Capture Pilot,您可以无线连接到 IQ2 数码后背,并增强拍摄流程和工作效率。IQ2 数码后背将功能性设计与坚固耐用的制造质量相结合。后背由 100% 航空级铝制成,所有电子连接器和端口均采用自动缩回舱口或橡胶盖保护,以确保它们即使在最恶劣的拍摄环境中也能持续工作。
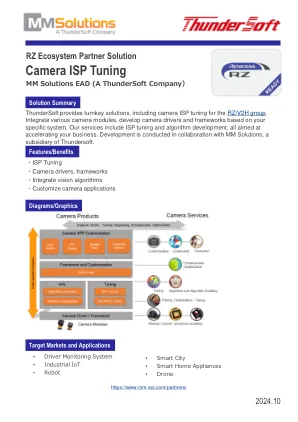
mm解决方案摄像头ISP
Thundersoft提供交钥匙解决方案,包括RZ/V2H组的相机ISP调整。根据您的特定系统集成了各种相机模块,开发相机驱动程序和框架。我们的服务包括ISP调整和算法开发,旨在加快您的业务。开发是与Thundersoft的子公司MM Solutions合作进行的。

机器人技术的微扫描启发的活动摄像机
神经形态视觉传感器或事件摄像机使人们对极低的反应时间的视觉感知,为高动力机器人应用开辟了新的途径。这些事件摄像机的输出取决于运动和纹理。但是,事件摄像机无法捕获与相机运动平行的对象边缘。这是传感器固有的问题,因此具有挑战性地求解算法。人类的视力涉及使用小型眼动的主动机制,即最突出的动作,这是最突出的动作。通过在固定过程中不断地移动眼睛,微扫视可以基本上保持纹理稳定性和持久性。受微观启发的启发,我们设计了一个基于事件的感知系统,能够同时保持低反应时间和稳定的质感。在此示例中,将旋转的楔形棱镜安装在事件摄像头的光圈前,以重定向光线和触发事件。旋转楔形棱镜的几何光学器件允许对额外的旋转运动进行算法补偿,从而导致稳定的纹理外观和高信息输出,而与外部运动无关。硬件设备和软件解决方案都集成到系统中,我们称之为人工微扫视增强事件摄像头(AMI-EV)。基准比较验证了在标准摄像机和事件摄像机无法交付的情况下,AMI-EV记录的出色数据质量。各种现实世界的实验表明了系统的潜力,可以促进低级和高级视力任务的机器人感知。

相机排列目录
●DCAM-API是Hamamatsu Photonics K.K.的注册商标。(欧盟,日本,英国,美国)。●ORCA和QCMO是Hamamatsu Photonics K.K.的注册商标。(中国,欧盟,日本,英国,美国)。●Windows是美国Microsoft Corporation(和其他国家 /地区)的注册商标。●此手册中指出的产品和软件包名称是其各自制造商的商标或注册商标。●遵守本地技术要求和法规,本小册子中包含的产品的可用性可能会有所不同。请咨询您当地的销售代表。●本小册子中描述的产品旨在符合书面规格,当时严格按照所有说明使用。●此手册中指定的光谱响应是典型的价值,不能保证。●规格和外观如有更改,恕不另行通知。©2024 Hamamatsu Photonics K.K.

轴Q1728块摄像机
Axis Edge Vault是基于硬件的网络安全平台,可保护轴心设备。它构成了所有安全操作取决于并提供保护设备身份,保护其完整性并保护敏感信息免受未经授权访问的功能的基础。例如,Secure Boot确保设备只能使用签名的OS启动,从而防止物理供应链TAMPERING。使用签名的OS,该设备还可以在接受安装之前验证新设备软件。和安全的密钥库是用于保护安全通信的加密信息的关键建筑块(IEEE 802.1X,https,axis设备ID,访问控制键等)如果违反了恶意提取。通过常见的标准或FIPS 140认证的基于硬件的加密计算模块提供安全的密钥库和安全连接。

轴Q1728块摄像机
Axis Edge Vault是基于硬件的网络安全平台,可保护轴心设备。它构成了所有安全操作取决于并提供保护设备身份,保护其完整性并保护敏感信息免受未经授权访问的功能的基础。例如,Secure Boot确保设备只能使用签名的OS启动,从而防止物理供应链TAMPERING。使用签名的OS,该设备还可以在接受安装之前验证新设备软件。和安全的密钥库是用于保护安全通信的加密信息的关键建筑块(IEEE 802.1X,https,axis设备ID,访问控制键等)如果违反了恶意提取。通过常见的标准或FIPS 140认证的基于硬件的加密计算模块提供安全的密钥库和安全连接。
LPR 摄像机系列 - Milesight
想象一下,如果有一种摄像头可以减轻人工监控交通的负担,它可以检测、准确读取车牌、测量速度以优化交通流量。Milesight 提供的 LPR 摄像头不仅能读取车牌,还能识别车辆类型、车辆颜色、车牌颜色等,并嵌入了 AI 支持的 LPR 算法,以实现更高级的使用。此外,Milesight LPR 摄像头还与其他尖端技术(如 3D 雷达、补光灯、PTZ)集成,以显著扩展其核心功能。凭借令人惊叹的强大功能,Milesight LPR 摄像头非常适合高要求的道路交通监控情况。
LPR 摄像机系列 - Milesight
想象一下,如果有一种摄像头可以减轻人工监控交通的负担,它可以检测、准确读取车牌、测量速度以优化交通流量。Milesight 提供的 LPR 摄像头不仅能读取车牌,还能识别车辆类型、车辆颜色、车牌颜色等,并嵌入了 AI 支持的 LPR 算法,以实现更高级的使用。此外,Milesight LPR 摄像头还与其他尖端技术(如 3D 雷达、补光灯、PTZ)集成,以显著扩展其核心功能。凭借令人惊叹的强大功能,Milesight LPR 摄像头非常适合高要求的道路交通监控情况。

轴Q1728块摄像机
Axis Edge Vault是基于硬件的网络安全平台,可保护轴心设备。它构成了所有安全操作取决于并提供保护设备身份,保护其完整性并保护敏感信息免受未经授权访问的功能的基础。例如,Secure Boot确保设备只能使用签名的OS启动,从而防止物理供应链TAMPERING。使用签名的OS,该设备还可以在接受安装之前验证新设备软件。和安全的密钥库是用于保护安全通信的加密信息的关键建筑块(IEEE 802.1X,https,axis设备ID,访问控制键等)如果违反了恶意提取。通过常见的标准或FIPS 140认证的基于硬件的加密计算模块提供安全的密钥库和安全连接。
LPR 摄像机系列 - Milesight
想象一下,如果有一种摄像头可以减轻人工监控交通的负担,它可以检测、准确读取车牌、测量速度以优化交通流量。Milesight 提供的 LPR 摄像头不仅能读取车牌,还能识别车辆类型、车辆颜色、车牌颜色等,并嵌入了 AI 支持的 LPR 算法,以实现更高级的使用。此外,Milesight LPR 摄像头还与其他尖端技术(如 3D 雷达、补光灯、PTZ)集成,以显著扩展其核心功能。凭借令人惊叹的强大功能,Milesight LPR 摄像头非常适合高要求的道路交通监控情况。