
机构名称:
¥ 1.0
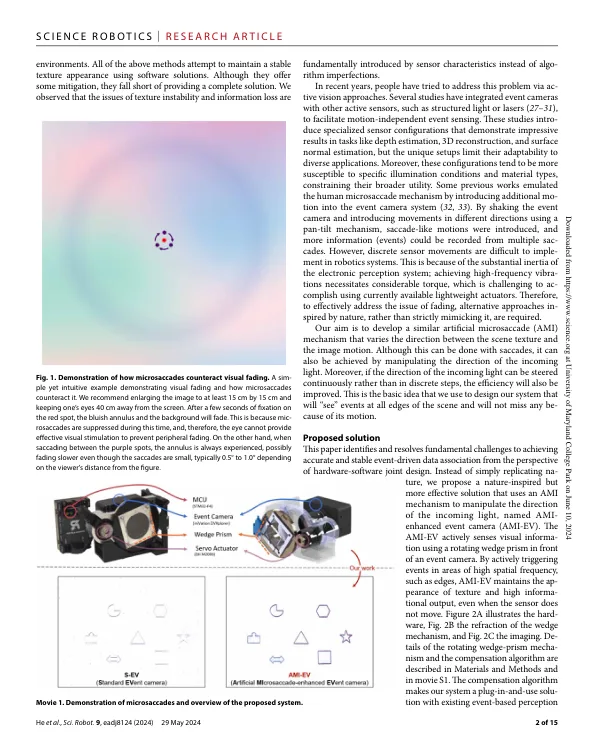
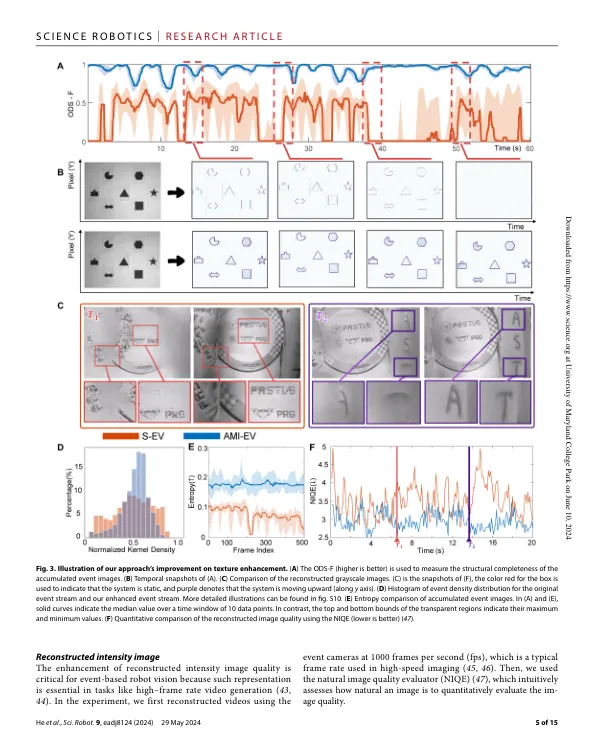
神经形态视觉传感器或事件摄像机使人们对极低的反应时间的视觉感知,为高动力机器人应用开辟了新的途径。这些事件摄像机的输出取决于运动和纹理。但是,事件摄像机无法捕获与相机运动平行的对象边缘。这是传感器固有的问题,因此具有挑战性地求解算法。人类的视力涉及使用小型眼动的主动机制,即最突出的动作,这是最突出的动作。通过在固定过程中不断地移动眼睛,微扫视可以基本上保持纹理稳定性和持久性。受微观启发的启发,我们设计了一个基于事件的感知系统,能够同时保持低反应时间和稳定的质感。在此示例中,将旋转的楔形棱镜安装在事件摄像头的光圈前,以重定向光线和触发事件。旋转楔形棱镜的几何光学器件允许对额外的旋转运动进行算法补偿,从而导致稳定的纹理外观和高信息输出,而与外部运动无关。硬件设备和软件解决方案都集成到系统中,我们称之为人工微扫视增强事件摄像头(AMI-EV)。基准比较验证了在标准摄像机和事件摄像机无法交付的情况下,AMI-EV记录的出色数据质量。各种现实世界的实验表明了系统的潜力,可以促进低级和高级视力任务的机器人感知。
机器人技术的微扫描启发的活动摄像机
主要关键词



相关文件推荐





























