机构名称:
¥ 1.0
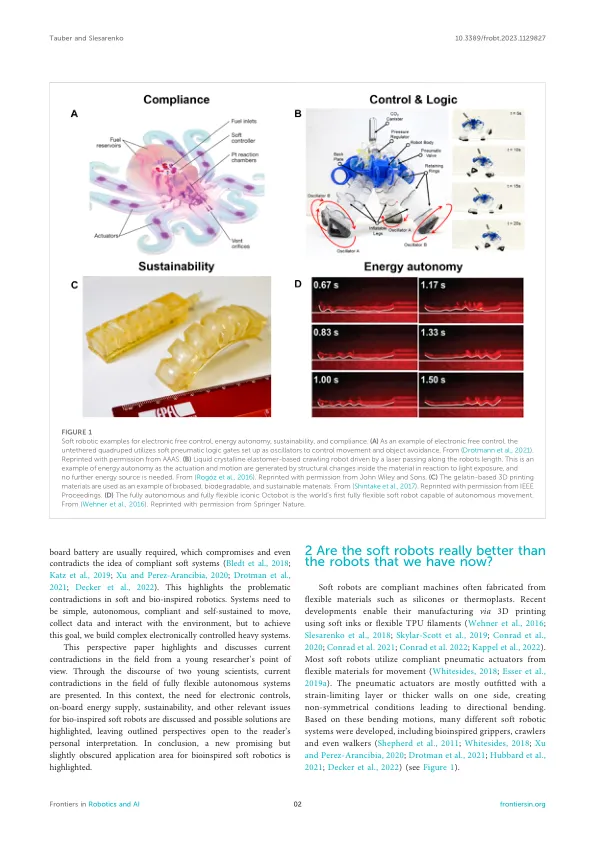
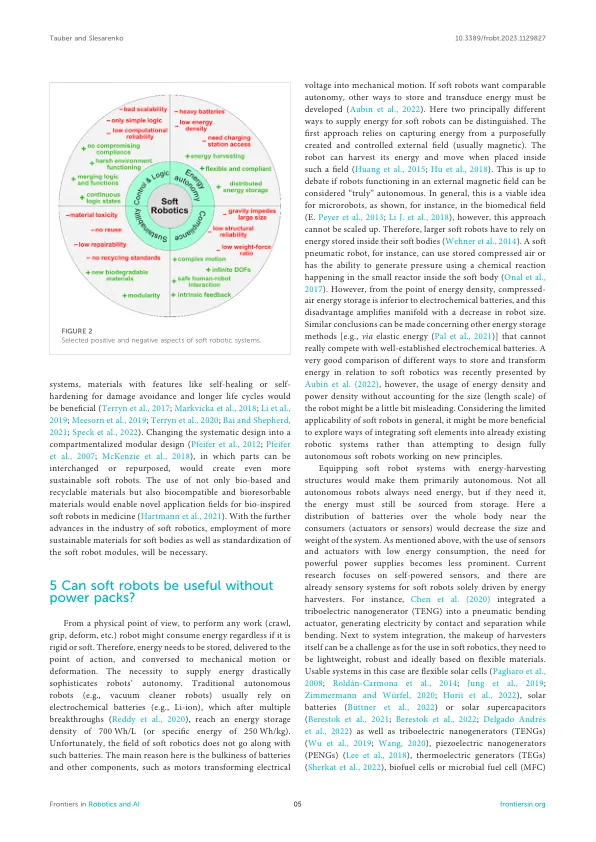
在最近的十年中,我们目睹了一种非凡的软机器人技术。对软机器人的重新点燃的兴趣与制造技术的进步部分相关,这些技术使得能够在多个长度尺度上制造具有尺寸的复杂多物质机器人体。在最近的手稿中,读者可能会发现能够抓握,步行或游泳的奇特的柔软机器人。但是,出版数量的增长并不总是反映出该领域的真正进步,因为许多手稿采用了非常相似的想法,并且只是调整了软体的几何形状。因此,我们毫无保留地同意未来研究必须超越“为了软化的柔软的事物)的情绪。”软机器人无疑是一个引人入胜的领域,但它需要对限制和挑战进行批判性评估,使我们能够聚焦软机器人在传统同行中拥有最佳杠杆作用的领域和方向。在这一观点论文中,我们讨论了与能源自治,无电子逻辑和可持续性等重要方面有关的机器人研究的现状。目的是从早期职业研究人员提供的两个相反的观点批判性地研究软机器人技术的观点,并突出显示未来最有希望的未来方向,即我们认为,使用软机器人技术来利用软机器人技术来实现软生物启发的人工技术。
早期职业科学家就软机器人技术的未来交谈
主要关键词



相关文件推荐