XiaoMi-AI文件搜索系统
World File Search SystemCalibration
Fluke Calibration 产品和服务 - Comtest
• 6.5 英寸 VGA 电容式触摸屏,带全彩图形用户界面 • 菜单和功能有 9 种语言可供选择 • Visual Connection Management™ 终端指导电缆连接 • 通过使用现代模拟和数字组件以及最先进的电路板技术,提高了操作可靠性 • 工件校准 - 仅使用三个外部标准(10 V、1 ohm 和 10 k ohm)来自动调整整个仪器的过程 - 将性能优化到最佳指定性能 • 校准检查 - 测试所有功能和范围自最近一次校准以来是否存在任何漂移的过程 - 提供对性能的持续信心。任何输出漂移都会根据规格进行测量和评估。• 与 52120A 和 5725A 放大器兼容 • 与 5700A 和 5720A 程序完全兼容 MET/CAL ®(MET/CAL 版本 7.3 及以上) • 提供 30 MHz 和 50 MHz 宽带输出选项


速度和颗粒物的风洞校准...
EPA 在美国联邦法规 40CFR60 附录 A 中提供了测试协议“方法 2”,其中描述了 S 型皮托管的正确使用方法。尽管 S 型皮托管有标准设计,但制造公差的微小偏差和随时间推移的磨损都会导致探针测量值发生变化。因此,EPA 方法 2 提供了有关如何在风洞的受控环境中定期校准探针的指南。通过适当的校准,可以在工业场所的管道和烟囱的气流中获得最准确的流量测量值。为了保护公众免受过量污染排放的影响,EPA 要求工业场所测量的不仅仅是排气管中的气体流速。还需要测量污染物排放,例如包括氮氧化物 (NOx)、硫氧化物 (SOx) 或汞 (Hg) 在内的气态化学物质。如果设施有颗粒物
统一内在和外在校准... - KIT
配备足够传感器的无人驾驶飞行器 (UAV) 可在昂贵的大规模机载遥感和耗时的小规模地面测量之间实现新的应用。要执行这些应用,相机和激光扫描仪是很好的传感器组合,因为它们具有互补特性。要利用这种传感器组合,必须知道各个相机的内在参数和相对姿势以及相机和激光扫描仪的相对姿势。在本文中,我们提出了一种多相机系统和激光扫描仪统一内在和外在校准 (UCalMiCeL) 的方法。该方法的创新之处在于它是从单个相机到线激光扫描仪校准的扩展,它是一种统一的捆绑调整步骤,以确保对整个传感器系统进行最佳校准。我们使用通用相机模型,包括针孔、全向和鱼眼相机。对于我们的方法,激光扫描仪和每个相机必须共享一个联合视野,而各个相机的视野可能不相交。校准方法通过由两个鱼眼相机和一个线激光扫描仪组成的传感器系统进行测试,范围测量精度为 30 毫米。我们使用基于控制点的多相机系统附加校准方法定量评估相机之间的估计相对姿势,这些控制点由 mo
SWATCUP 中 SWAT 的校准及不确定性分析
Houshmand D. 等人,2017 年。校准参数和水资源估计对不同目标函数和优化算法的敏感性。水,9,384。https://www.mdpi.com/2073-4441/9/6/384

相机/IMU 瞄准镜校准 - Applanix
在使用 GPS/IMU 进行直接地理参考测绘模式或甚至使用空中三角测量测绘时,相机/IMU 视轴校准是测绘过程中的关键要素。一些研究人员证明了需要最佳的视轴校准过程、程序和软件工具。因此,本文重点介绍使用 Applanix Corporation 新发布的 POSCal TM 软件在视轴校准领域的最新发展。首先,简要讨论以描述性方式总结软件功能。然后,简要介绍了软件中实现的多种分析工具,这些工具是进行 GPS、IMU、图像、地面控制和基准问题的质量保证和质量控制所必需的。已经进行了一项分析研究来测试该软件的分析工具。这项研究使用了加利福尼亚州奥克兰的 HJW GeoSpatial Inc 和欧洲实验摄影测量研究组织 (OEEPE) 的试点中心(汉诺威大学)收集的真实数据集。所有数据集均由配备 6 英寸镜头锥体的 9 英寸 x 9 英寸胶片相机和 Applanix POS/AV TM 510 系统采集。此外,所有数据集都具有良好的地面控制点数量、分布和准确性、高质量的图像测量值以及良好的 GPS 和 IMU 数据。这使得我们可以从高质量的数据集开始,其中故意引入偏差和噪声进行分析 p
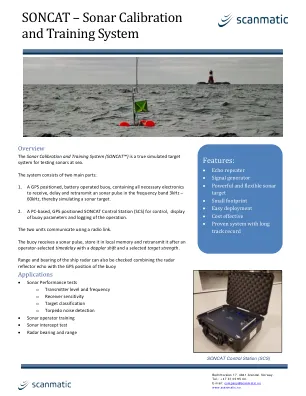
SONCAT – 声纳校准和训练系统
概述 声纳校准和训练系统 (SONCAT™) 是用于测试海上声纳的真实模拟目标系统。该系统由两个主要部分组成: 1. GPS 定位、电池供电的浮标,包含所有必要的电子设备,用于接收、延迟和重新发送 3kHz – 60kHz 频段的声纳脉冲,从而模拟声纳目标。 2. 基于 PC、GPS 定位的 SONCAT 控制站 (SCS),用于控制、显示浮标参数和记录操作。两个单元使用无线电链路进行通信。浮标接收声纳脉冲,将其存储在本地内存中,并在操作员选择的延时后以多普勒频移和选定的目标强度重新发送。还可以结合雷达反射器回波和浮标的 GPS 位置来检查船舶雷达的距离和方位

位置校准软件 - NPL 出版物
本报告记录了 Fortran 软件的实现,该软件用于确定从配准点测量到的不同参考系之间的转换。该问题出现在通过跟踪三个或更多个与工件刚性移动的点(配准点)的位置来确定工件的位置和方向时。该软件找到转换参数的最小二乘估计值以及配准点在公共参考系中的位置。这些估计值由非线性最小二乘求解器有效计算,该求解器充分考虑了定义解的矩阵方程的结构。初始估计模块确定优化参数的良好起始值。还有用于计算拟合参数和相关量的标准不确定度的模块。该软件可以直接应用于使用坐标计量中的分阶段或重新定位方法测量大型或复杂工件。
Fluke 校准产品和服务 - Intronica
• 6.5 英寸 VGA 电容式触摸屏,配备全彩色图形用户界面 • 菜单和功能有 9 种语言可供选择 • Visual Connection Management™ 终端可指导电缆连接 • 通过使用现代模拟和数字组件以及最先进的电路板技术,提高了操作可靠性 • 工件校准 — 仅使用三个外部标准(10 V、1 ohm 和 10 k ohm)即可自动调整整个仪器 — 将性能优化到最佳指定性能 • 校准检查 — 测试所有功能和范围自最近一次校准以来是否存在任何漂移的过程 — 可持续确保性能。将根据规格测量和评估任何输出漂移。 • 兼容 52120A 和 5725A 放大器 • 完全兼容 MET/CAL ®,兼容 5700A 和 5720A 程序(MET/CAL 版本 7.3 及更高版本) • 提供 30 MHz 和 50 MHz 宽带输出选项