XiaoMi-AI文件搜索系统
World File Search SystemDAR

从可再生木质纤维素农业生物质中得出的可持续生物塑料的生产:全面的评论
1, 1,坦多农业大学农业工程学院,坦多·卡米(Tando Jam),海德拉巴(Hyderabad工程技术(UET),木尔坦,旁遮普邦,巴基斯坦4化学工程系,工程学院,Modibbo Adama University,PMB 2076,Yola,Yola,Adamawa State,尼日利亚5号,尼日利亚5号,尼日利亚5,帕特纳大学,帕特纳,印度帕特纳,印度6号,印度6号,6 6印度,6 6印度,环境科学技术系,工程学和环境研究院, 框35176 DAR ES SALAAM,坦桑尼亚1,坦多农业大学农业工程学院,坦多·卡米(Tando Jam),海德拉巴(Hyderabad工程技术(UET),木尔坦,旁遮普邦,巴基斯坦4化学工程系,工程学院,Modibbo Adama University,PMB 2076,Yola,Yola,Adamawa State,尼日利亚5号,尼日利亚5号,尼日利亚5,帕特纳大学,帕特纳,印度帕特纳,印度6号,印度6号,6 6印度,6 6印度,环境科学技术系,工程学和环境研究院,框35176 DAR ES SALAAM,坦桑尼亚
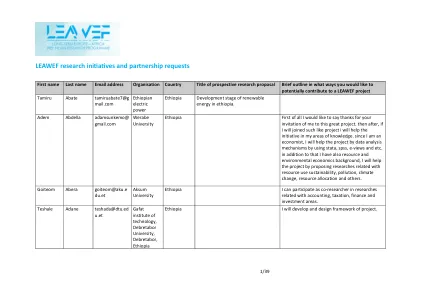
Leawef研究计划和合作伙伴要求-NWO
i,来自巴希尔·达大学(Bahir Dar University)巴希尔达尔技术学院巴希尔(Bahir Dar)能源中心,对该项目感兴趣,该项目旨在通过将可再生能源解决方案集成到该地区的水和食品系统中,尤其是埃塞俄比亚,旨在创建可持续和弹性的社区。我将参与对最新可再生能源技术及其在农业,牲畜生产,水管理,清洁烹饪燃料和有效烹饪库中的应用进行全面研究,并分析数据以识别最有效,最具成本效益的解决方案。社区参与涉及促进研讨会和培训课程,以教育当地社区有关可再生能源的利益和使用,收集社区成员的反馈,并确保解决方案满足他们的需求和偏好。技术支持包括设计和实施可再生能源系统,例如太阳能灌溉,用于烹饪的沼气和水泵系统,以及提供持续的技术支持以确保其效率和有效性。监视和评估涉及开发和实施监视框架,以评估可再生能源解决方案对水和粮食安全的影响,确定改进的领域以及将成功的模型扩展到其他地区。政策倡导涉及与政府机构和非政府组织合作,以支持支持可再生能源在农业和水管理中的政策,提供
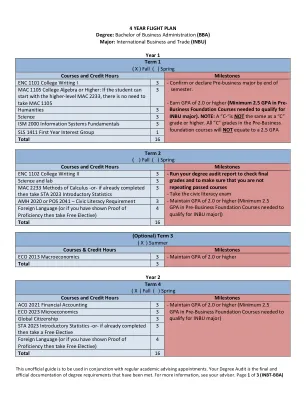
国际商业与贸易(INBU)1年期限
4年级10(x)秋季()春季课程和学分里程碑人4720全球战略和政策3-运行您的学位审计报告(DAR)并与COB顾问会面以确认毕业要求 - 继续工作/研究生院计划。- 与研究生院顾问会面申请研究生课程 *选择一个国际同源:MAN4597,MAN3442,ECS3013,ECO4704,ECO4713,BUL4461,HSA4124,HSA4124,RMI4423,RMI4423,MAN4940

第三蓝色经济会议(BEC2024)致电...
与加纳阿克拉的地区海事大学(RMU)合作,达累斯萨拉姆海事学院很高兴地宣布呼吁国际蓝色经济会议论文(BEC2024)。该会议旨在将国际利益相关者汇集在一起,专注于海上发展的背景下的蓝色经济。强调可持续性,该活动努力为国家增长做出重大贡献。在这一年中,会议目标是建立一个利益相关者之间能力建设和网络的平台,从而促进蓝色经济与海上安全和安全,气候变化的考虑以及相关可持续发展目标(SDGS)中概述的技术进步。该会议将于2024年7月4日至5日在朱利叶斯·尼雷尔国际会议中心达累斯萨拉姆举行。

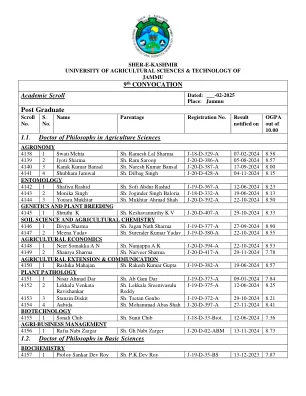
第9次会议学术卷轴
OGPA 10.00 1.1。 农业科学哲学博士农业学4138 1 Swati Mehta Sh。 Ramesh Lal Sharma J-18-D-329-A 07-02-2024 8.58 4139 2 Jirty Sharma Sh。 RAM SAROPE J-20-D-386-A 05-08-2024 8.57 4140 3 CANNIT KUMAR BANSAL SH。 Naresh Kumar带J-20-D-387-A 17-09-2024 8.00 4141 4 Shubham Jamwal SH。 DILBAG SINGH J-20-D-428-A 04-11-2024 8.15 ENTOMOGY 4142 1 SHAFIA RASHID SH。 SOFI ABDUR RASHID J-19-D-367-A 12-06-2024 8.23 4143 2 MONIKA SINGH SH。 Joginer Singh Balori J-18-D-332-A 19-06-2024 8.13 414 Mukhtar Ahmad Shah J-20-D-392-A 22-10-2024 Keshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSOGPA 10.00 1.1。 农业科学哲学博士农业学4138 1 Swati Mehta Sh。 Ramesh Lal Sharma J-18-D-329-A 07-02-2024 8.58 4139 2 Jirty Sharma Sh。 RAM SAROPE J-20-D-386-A 05-08-2024 8.57 4140 3 CANNIT KUMAR BANSAL SH。 Naresh Kumar带J-20-D-387-A 17-09-2024 8.00 4141 4 Shubham Jamwal SH。 DILBAG SINGH J-20-D-428-A 04-11-2024 8.15 ENTOMOGY 4142 1 SHAFIA RASHID SH。 SOFI ABDUR RASHID J-19-D-367-A 12-06-2024 8.23 4143 2 MONIKA SINGH SH。 Joginer Singh Balori J-18-D-332-A 19-06-2024 8.13 414 Mukhtar Ahmad Shah J-20-D-392-A 22-10-2024 Keshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERS农业科学哲学博士农业学4138 1 Swati Mehta Sh。 Ramesh Lal Sharma J-18-D-329-A 07-02-2024 8.58 4139 2 Jirty Sharma Sh。 RAM SAROPE J-20-D-386-A 05-08-2024 8.57 4140 3 CANNIT KUMAR BANSAL SH。 Naresh Kumar带J-20-D-387-A 17-09-2024 8.00 4141 4 Shubham Jamwal SH。 DILBAG SINGH J-20-D-428-A 04-11-2024 8.15 ENTOMOGY 4142 1 SHAFIA RASHID SH。 SOFI ABDUR RASHID J-19-D-367-A 12-06-2024 8.23 4143 2 MONIKA SINGH SH。 Joginer Singh Balori J-18-D-332-A 19-06-2024 8.13 414 Mukhtar Ahmad Shah J-20-D-392-A 22-10-2024 Keshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSRamesh Lal Sharma J-18-D-329-A 07-02-2024 8.58 4139 2 Jirty Sharma Sh。 RAM SAROPE J-20-D-386-A 05-08-2024 8.57 4140 3 CANNIT KUMAR BANSAL SH。 Naresh Kumar带J-20-D-387-A 17-09-2024 8.00 4141 4 Shubham Jamwal SH。 DILBAG SINGH J-20-D-428-A 04-11-2024 8.15 ENTOMOGY 4142 1 SHAFIA RASHID SH。 SOFI ABDUR RASHID J-19-D-367-A 12-06-2024 8.23 4143 2 MONIKA SINGH SH。 Joginer Singh Balori J-18-D-332-A 19-06-2024 8.13 414 Mukhtar Ahmad Shah J-20-D-392-A 22-10-2024 Keshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSRAM SAROPE J-20-D-386-A 05-08-2024 8.57 4140 3 CANNIT KUMAR BANSAL SH。 Naresh Kumar带J-20-D-387-A 17-09-2024 8.00 4141 4 Shubham Jamwal SH。 DILBAG SINGH J-20-D-428-A 04-11-2024 8.15 ENTOMOGY 4142 1 SHAFIA RASHID SH。 SOFI ABDUR RASHID J-19-D-367-A 12-06-2024 8.23 4143 2 MONIKA SINGH SH。 Joginer Singh Balori J-18-D-332-A 19-06-2024 8.13 414 Mukhtar Ahmad Shah J-20-D-392-A 22-10-2024 Keshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSNaresh Kumar带J-20-D-387-A 17-09-2024 8.00 4141 4 Shubham Jamwal SH。 DILBAG SINGH J-20-D-428-A 04-11-2024 8.15 ENTOMOGY 4142 1 SHAFIA RASHID SH。 SOFI ABDUR RASHID J-19-D-367-A 12-06-2024 8.23 4143 2 MONIKA SINGH SH。 Joginer Singh Balori J-18-D-332-A 19-06-2024 8.13 414 Mukhtar Ahmad Shah J-20-D-392-A 22-10-2024 Keshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSDILBAG SINGH J-20-D-428-A 04-11-2024 8.15 ENTOMOGY 4142 1 SHAFIA RASHID SH。 SOFI ABDUR RASHID J-19-D-367-A 12-06-2024 8.23 4143 2 MONIKA SINGH SH。 Joginer Singh Balori J-18-D-332-A 19-06-2024 8.13 414 Mukhtar Ahmad Shah J-20-D-392-A 22-10-2024 Keshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSSOFI ABDUR RASHID J-19-D-367-A 12-06-2024 8.23 4143 2 MONIKA SINGH SH。 Joginer Singh Balori J-18-D-332-A 19-06-2024 8.13 414 Mukhtar Ahmad Shah J-20-D-392-A 22-10-2024 Keshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSJoginer Singh Balori J-18-D-332-A 19-06-2024 8.13 414 Mukhtar Ahmad Shah J-20-D-392-A 22-10-2024 Keshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSMukhtar Ahmad Shah J-20-D-392-A 22-10-2024 Keshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSKeshavamurthy C V J-20-D-407-A 29-10-2024 8.33土壤科学与农业化学学4146 1 Devia Sharma Sh。 Jagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSJagan North Sharma J-19-D-377-A 27-09-2024 8.90 4147 2 Meena Yadav Sh。 Surender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSSurender Kumar Yadav J-19-D-380-A 22-10-2024 8.55农业经济学4148 1附近Soakca A N sh。 Nanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSNanjappa A K J-20-D-394-A 22-10-2024 8.53 4149 2 Sharea Sharma Sh。 NAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSNAVER SHARMA J-20-D-417-A 29-11-2024 7.78农业扩展与通信4150 1 Rashic Mahaja SH。 Rakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSRakesh Kumar Gupta J-19-D-382-A 19-06-2024 8.57植物病理学4151 AB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERSAB GANI DAR J-19-D-373-A 09-01-2024 7.84 4152 2 LEKLAA VENKATA RAVICHANKERS


四位哈里发的社会改革举措
5 哈马德·本·侯赛因·本·阿里·本·穆萨,阿布·巴克尔·拜哈基,苏南·库布拉,达尔·库图布·阿拉米,贝鲁特 - 拉巴纳特,编辑:3,编号:16650 6 布哈里圣训,天课书,瓦朱布·天课瓦特章,圣训:1400