XiaoMi-AI文件搜索系统
World File Search SystemDEPT

D. Kumar博士,M.E。 博士A.七 M.Latha博士,M.E.,Ph.D。 博士Priya.S,我,博士 博士Michael Mahesh K Ever,我,博士 先生N. Chapter,M.Tech。,(博士) 先生 女士。 Aarthi B,M.E。(博士)..
5。Neelakantam,H。K.,Makala,B。P.,Kommoju,P.,Ogirala,D.S.R.,Suneel,P.N。和Manoj Kumar。(2023年,四月)。lte和Wlan公平的无牌带共存。在2023年第二次国际电气,电子,信息和通信技术会议(ICEEICT)(pp。1-5)。IEEE。IEEE。


数学 III - 课程框架 (加州教育部)
在数学 III 中,学生了解多项式系统和整数系统之间的结构相似性。学生利用多项式算术和十进制计算之间的类比,重点关注运算性质,特别是分配性质。他们将多项式乘法与多位整数乘法联系起来,将多项式除法与整数长除法联系起来。学生识别多项式的零点,并将多项式的零点与多项式方程的解联系起来。他们对多项式表达式的研究最终以代数基本定理结束。有理数通过允许除 0 之外的所有数字来扩展整数的算术。类似地,有理表达式通过允许除零多项式之外的所有多项式来扩展多项式的算术。使用有理表达式的一个中心主题是,有理表达式的算术受制于与有理数算术相同的规则。
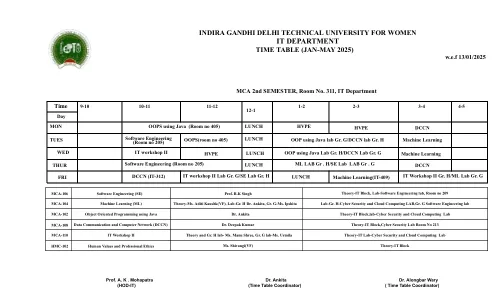
最终2025年,它甚至部门sem time table_jan-may .docx
A. K教授。 Mohapatra Ankita Dr.A. K教授。Mohapatra Ankita Dr.
人工智能与数据科学工程系 (1.3.2 基于项目的学习)
在我的指导下成功完成了题为“联系人管理系统”的项目,部分满足了 2023-2024 学年 Savitribai Phule Pune 大学人工智能与数据科学系工程二年级的要求。

日期批处理部门编号编号SEM Sub Code ...
Bharath科学技术学院结束学期考试-NOV / 2023年12月表B.Tech(FT) - 2018年,2019年,2019年批次 - 重新出现考试(Min。< / div>四个主题)
(2024-12-23)Howard Lutnick商务部卫星冲突研究
摘要:当选总统特朗普已选定亿万富翁霍华德·卢特尼克(Howard Lutnick)担任美国商务部部长,卢特尼克目前担任特朗普过渡期的联席主席,此前他为特朗普 2024 年竞选筹集了 7500 万美元。商务部是一个“庞大”的内阁部门,负责监管专利、国家气象局、太空卫星、科学标准、贸易限制、经济数据和一系列其他事务。卢特尼克是金融服务“巨头”坎托·菲茨杰拉德的董事长兼首席执行官,他已经被指控“将其商业利益与”特朗普的第二次过渡期混为一谈,如果他被任命,他可能会在制定“一系列经济政策”的角色中引发进一步的冲突。例如,卢特尼克已经申请了 1,000 多项专利,他将负责监管商务部的美国专利商标局。尽管 Lutnick 声称将撤资自己的商业帝国,但他与 Cantor Fitzgerald 的关系却十分密切,他似乎准备与 Cantor 保持密切的业务往来,他的儿子曾为 Cantor 的主要加密货币公司客户 Tether 工作,并将于 2024 年 12 月担任 Cantor 最新空白支票公司的首席执行官。现在,Accountable.US 的审查发现,Lutnick 和 Cantor Fitzgerald 在商业航天行业的利益可能会与 Lutnick 领导商务部的潜在角色产生具体冲突,同时也会使他的“亲密”盟友和亿万富翁埃隆·马斯克受益:
(2024-12-23)关于霍华德·卢特尼克贸易部的研究,加密冲突
摘要:当选总统特朗普已选择亿万富翁霍华德·卢特尼克(Howard Lutnick)担任美国商务部的秘书,该部门是一个“庞大的”内阁部门,负责监督专利,国家气象局,太空卫星,科学标准,贸易限制,经济数据以及其他事项。金融服务“ Titan” Cantor Fitzgerald的董事长兼首席执行官Lutnick已经被指控将“将他的商业利益”与第二个特朗普过渡“混合”,如果他被确认为商业秘书,则可能会在其角色构成“广泛的经济政策”的角色中造成进一步的冲突。例如,已提交1000多项专利的卢特尼克(Lutnick)将监督商业部的美国专利商标局。尽管卢特尼克(Lutnick)声称他将从自己的商业帝国中脱离,但他与康托尔·菲茨杰拉德(Cantor Fitzgerald)深深地“纠缠”了,他似乎准备好与他的儿子一起工作,他的儿子为康托尔(Cantor)的主要加密货币公司Tether工作,被列为Cantor最新的Blank-Check Company of Cantor列出的最新空白合作公司。尤其是卢特尼克(Lutnick)作为加密货币的声音倡导者而闻名。卢特尼克(Lutnick)在一次行业会议上说,加密货币的领先形式应被接受“''毫无例外,无限制。'“他还是大型加密公司Tether的“关键盟友”,坎托持有约6亿美元,坎托在2024年11月加入了一个新的20亿美元贷款项目。现在,负责任的研究发现,卢特尼克在加密货币行业中的巨大股份如何与他对美国商务部的潜在控制相抵触,该部门在制定加密法规和研究加密技术方面发挥了核心作用:

G. RAMYA ME 博士,博士,电子与计算机工程系副教授......
使用建议的基于开关电容多级逆变器的静态同步补偿器的系统。收录于:Mallick, PK、Bhoi, AK、González-Briones, A.、Pattnaik, PK(编辑)《电子系统与智能计算》。《电气工程讲义》,第 860 卷。Springer,新加坡。(SCOPUS)

ELA/ELD框架网络研讨会会议2-扫盲(教育部门)
•了解大脑研究如何告知扫盲的教学•了解基础技能在扫盲发展中的作用•了解框架提供的指导•了解多语言学习者基础技能的作用•在ELA/ELD框架中确定资源以支持指导