XiaoMi-AI文件搜索系统
World File Search SystemDetection

car damage detection using machine learning
Siruganur ,Trichy Abstract – Modern car insurance industries waste a lot of resources due to claim leakages, which determines the amount they pay. Currently,visual Inspections and Validations are done manually,which can delay the claim processes.Previous study have shown that classifying images is possible with a small data set,by transferring and re purposing knowledge from models trained for a different task. Our goal is to build a Car Damage classifier using a deep learning model that is able to detect the different damage types and give an accurate depiction given a car image. However, due to the limiting set of data, it can be result in being a determining factor.Training a Convolutional Network from scratch (with random initialization) is difficult because it is relatively rare to have a large enough dataset.In this project we explore the problem of classifying images containing damaged cars to try and assess the monetary value of the damage. Because of the nature of this problem,classifying this data may prove to be a difficult task since no standardized dataset exists and some of the clases utilized might not be discriminative enough. Utilizing a pretrained YOLOv8 model,we trained a classifier in order to categorize the dataset,testing 3 different cases: damaged or not (damage vs whole),damage location (front vs rear vs side),damage level (minor vs moderate vs severe). Index Terms - YOLO model,CNN
抄袭检测和 AI* 检测软件指南。
对抄袭或使用人工智能等学术不端行为做出最终决定,并使用补充方法,例如:采访相关学习者,要求学习者提供强制性日志或声明,详细说明他们满足评估要求的过程以及他们对提交内容的理解(等如手册中所述)。建议学院/中心的多名代表参与此过程和后续决定。任何不利于学习者的决定都应一致通过。

检测技术
在盈利能力方面,已经取得了更多的DT,但在盈利能力方面已经实现了强劲的一年,尽管收益增长可能不再继续如此陡峭,但由于MBU,仍然有潜力。收益的收益现在更具挑战性,没有销售增长DT的3160万欧元收入与32000万欧元/3150万欧元的EVLI/CONS一致。估计,相对于480万欧元/520万欧元的EVLI/CONS,EBITA的520万欧比塔也不是一个大惊喜。估计。第四季度EBITA提高了060万欧元/Y/y,这是由提高生产率和持续有利的销售组合(相对于MBU的较高份额)驱动的。dt已经在一段时间前已经实现了成本降低,因此在我们看来,EBITA在第1季度的25年代可能不会进一步增长,因为SBU市场限制的临时问题在SBU市场限制增长范围内,但是我们相信,从第2季度开始,预期的双位数字增长应再次有助于盈利能力,以提高每季度几乎100万欧元。进一步的增长应从25 Q5 Q2'25提高收益,预计美国关税不会显着干扰业务(在美国没有本地探测器制造),至少只有将其保留在当前拟议的规模之内。SBU销售的块状性质意味着该单元可能是第1季度后增长最快的一个,而在我们看来,在漫长的凉爽时期长期表明,在近年来,在近年来,MBU市场迹象(在中国的增长和超越)之后,DT持续了很多季度的增长,这表明DT具有现实的机会。我们估计DT今年增长了9%,这应该有助于收益增加2-3m欧元(左右15%),因为费用主要由例如印度和一般资本支出的地点并不高。的收益倍数仍然很低,我们估计DT的EBITA利润率今年增加了约100bps,并且下一年,假设顶级线继续以中高的单位数率增长。dt现在在我们的25 fy'25估计值上重视12x eV/ebit,相对于同行而言,该估计值仍然是低倍数。近年来最大的收入收益率最大的收益现在已经落后了,但是DT似乎很明年,尤其是如果MBU在过去几年中挑战时开始加快步伐。dt仅重视10x eV/ebit。我们保留了17.0欧元的TP并购买评级。

对象检测
教授sasikumar.b@gmail.com和naveenmeti9353@gmail.com摘要:图像识别,增强现实,自动驾驶和监视的申请,这对这项计算机视觉至关重要。在这个项目中,使用复杂的深度学习技术来完成Python中检测到的事情。它使用预训练的卷积(CNN)模型使用神经网络,在图片或视频供稿中使用Yolo(仅查看一次)或SSD(单拍的多伯克斯检测器)来定位和识别事物。使用Pytorch和Tensor Flow等流行的库,使用thepython编程语言开发,训练和实现此副本时。用于处理传入数据的预处理程序,使用带注释的数据集的模型培训以及对新鲜照片或视频帧的推断都包含在实施中。此外,该项目还研究了如何加速推理,以便实时应用可以使用它。对象识别系统进行评估需要计算重要的性能度量,例如F1得分,回忆和精度。结果表明,在各种情况下,模型能够定位和识别项目。这项工作增加了扩展的机器视觉,并提供了一份有用的手册,用于利用Python实现感情对象。实现的模块化和灵活的设计使对于不同的用例和数据集修改变得易于修改。该项目的结果证明了在实际用途中进行更多突破的可能性,鼓励在包括图像处理,自主系统和监视的领域创新。关键字:Yolo


结合基于签名和基于行为的检测方法的高级入侵检测
1 韩国仁荷大学电气与计算机工程系,仁川 22212;heeyong.kr@gmail.com 2 德克萨斯 A&M 大学金斯维尔分校电气工程与计算机科学系,金斯维尔,TX 78363,美国;taesic.kim@tamuk.edu * 通信:mklee@inha.ac.kr;电话。:+82-32-860-7456 † 本文是我们在 ICNGC 2021 上发表的作品的扩展版本,题为“Hee-Yong Kwon;Taesic Kim;Mun-Kyu Lee。一种用于工业控制系统的混合入侵检测方法”,其中我们提出了一种混合入侵检测方法。在这个完整版本中,我们进行了额外的实验来微调各种参数和异常检测标准。因此,我们进一步提高了异常检测的性能。此外,我们还证明了所提出方法在执行时间方面的效率。
空气采样烟雾检测和线性热检测手册
本文档中包含的免责信息是根据当地标准获得的,由供应商,制造商和机构提供或发布的数据,以及通过安全消防检测的直接计算和测量来进行的直接计算和衡量。因此,检测公司和本文档应仅作为指导,读者应调查和使用所有本地和联邦法规。

环境中的微塑料检测...
Adjama Irédon*,1 Dr. Hemen Dave** 摘要:近年来,微塑料的存在已成为一种严重的环境威胁,造成生态风险和人类健康危害。当代研究表明,微塑料在环境中无处不在,包括陆地、水生、空中,甚至生物环境,即生物体内和人体内。因此,检测和分析环境基质中的微塑料是一项决定性任务,这对于预防和去除微塑料污染是必不可少的。然而,微塑料的来源多样,类型多样,需要在各种环境基质中进行检测。因此,要了解环境基质中的微塑料污染水平,微塑料检测和分析的复杂性包括定性和定量检测,然后根据聚合物的类型、大小和形状、结构类型(纤维、碎片、薄膜)等对微塑料进行分类。环境基质中的微塑料污染可以通过显微镜和视觉分类或光谱法进行评估。许多研究人员已经开发出使用显微镜进行视觉检测的方法,这些方法通常易于应用,但需要大量的人工工作时间,并且可能会得出误导性的结果,因为缺乏有关微塑料类型的进一步信息。虽然光谱法是一种适用于大量样本的简单方法,但对微塑料进行分类会进一步复杂化。为了解决这些问题,科学家们求助于人工智能 (AI) 的应用,以便更好地检测和分类过去几十年来从各种生态系统中采集的样本中积累的不同类型的微塑料。将人工智能与微塑料的微观或光谱检测相结合,可以成为微塑料检测的法医工具,以降低与检测和识别相关的复杂性。机器学习或人工神经网络可以成为处理光谱或显微镜获得的图像的强大工具,用于自动快速筛选/分类微塑料。基于人工智能的环境基质微塑料污染检测为大数据处理开辟了新的空间,具有可解释性,可提供可靠的结果和预测。本研究回顾了研究人员利用人工智能检测环境基质中的微塑料的方法,以自动和准确地对环境中的微塑料进行分类。关键词:微塑料、检测、环境基质、人工智能、机器学习、法医工具 I. 简介 塑料材料由多种聚合物以及颜色和其他添加剂制成,可根据应用和用户要求提供所需的特性。经济合作与发展组织 (OECD) 报告称,全球塑料产量已从 234

墙-墙边界检测
从一组线段中自动识别结构是一项挑战,因为并非所有定义建筑结构的线都能被低级图像处理完美检测到。使问题进一步复杂化的是,额外的边缘可能会位于墙壁表面或不属于目标结构的物体上。因此,大多数现有方法依赖于中级区域特征,如几何上下文和方向图 [7],作为布局估计的中间步骤。给定一张图像,我们确定其信息边缘图,然后用它来预测该图像的最佳拟合 3D 框。由于图像是现实世界的投影,因此最好以能够满足现实世界的方式来解释它们。大多数室内环境符合曼哈顿世界假设 [2],即大多数平面位于三个相互正交的方向之一。寻找建筑结构分三步完成;找到线段和消失点,创建许多合理的建筑模型假设,并根据方向图(区域方向的局部信念图)对每个假设进行测试,以
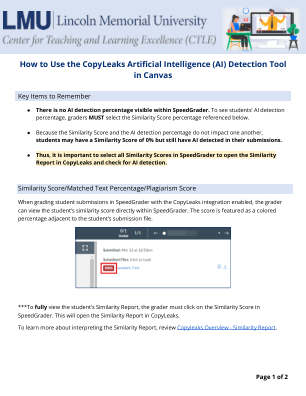
CopyLeaks AI 检测
在启用 CopyLeaks 集成的 SpeedGrader 中对学生提交内容进行评分时,评分者可以直接在 SpeedGrader 中查看学生的相似度分数。分数以彩色百分比形式显示在学生提交文件旁边。