XiaoMi-AI文件搜索系统
World File Search SystemHollnagel
安全 III:安全和弹性的系统方法
摘要:最近,人们对 Erik Hollnagel 教授提出的一些想法产生了浓厚的兴趣,这些想法被称为“安全-II”,并被认为是实现系统弹性的基础。他将安全-II 与他所描述的安全-I 进行了对比,他声称安全-I 是工程师现在为防止事故所做的工作。然而,他所描述的安全-I 与今天所做的工作或至少 70 年来安全工程所做的事情几乎没有相似之处。本文介绍了安全工程的历史,描述了不同行业实际实施的安全工程,指出了 Hollnagel 教授论点中的缺陷和不准确性以及安全-II 概念中的缺陷,并提出系统方法(安全-III)是未来的发展方向。
用于评估的弹性工程方法
评审团 Philippe CABON 先生,巴黎笛卡尔大学人体工程学系 HDR 讲师 报告员 Frederic VANDERHAEGEN 先生,瓦朗谢讷大学 LAMIH 教授 报告员 Nicholas MC DONALD 先生,都柏林圣三一大学心理学院教授 审查员 Pietro Carlo CACCIABUE 先生,米兰理工大学教授 审查员 Sébastien TRAVADEL 先生,BEA 调查部副主任 审查员 Erik HOLLNAGEL 先生,巴黎高科矿业大学教授 论文指导老师
安全通量电容器:从过去和现在中学习决定你的未来!
• 随着时间的推移 • 70 年代 – 一些活动,但主要是遵守 OSHA 的创作 • 80 年代 – James Reason 的瑞士奶酪模型 • 90 年代 – BBS 观察计划(STOP、BST、安全绩效系统、SafeTrack 等)• 90 年代末 – Larry Wilson 与 SafeStart(意识和技能)和 Scott Geller(以人为本的安全/积极关怀) • 2000 年代 – 2020 年代 – Dekker/Reasons(公正文化)、Hollnagel(安全 2)和 Conklin/其他人(HOP)

这是一篇原创文章的自存档版本... - Doria
态势感知 (SA) 已经取代传统的“方向舵和操纵杆”技能,成为空战中取胜的主要因素 (Endsley,1995;Svenmarckt 和 Dekker,2003)。态势感知通常被定义为一个人对当前状况的感知 (SA 级别 1)、对当前状况的理解 (SA 级别 2) 和对近期事件的预测 (SA 级别 3) 的三级结构 (Endsley,1995)。态势感知作为一个概念可能是有争议的。例如,Dekker 和 Hollnagel (2004) 将该概念描述为“民间模型”,并采用还原论方法,认为态势感知可以分解为可测量的具体组成部分 (例如决策、感知、理解和长期记忆)。他们还认为,态势感知不容易被证伪 (另见 Flach,1995)。即使承认 SA 确实存在,该概念的科学性仍有待商榷。例如,它存在于用户的认知中,还是更广泛系统的突发属性,以及最合适的测量方法是什么(有关更多详细信息,请参阅 Salmon 等人,2008 年;Endsley,2015 年;Stanton 等人,2017 年;Nguyen 等人,2019 年的广泛评论)?尽管如此,很明显,SA 的概念已成为评估系统和人类表现的重要指标。正如 Wickens (2008) 指出的那样“……人们可以说,该构造在理论和应用中的使用增加证明了
制定战略以增强人类...
目前没有有效的方法来消除这一差距。设计意图和维护实践之间的这种差距通常是由于设计工程师对实际维护方式缺乏认识,以及需要在时间压力下有效高效地维护飞机(通常是在困难的环境条件下)造成的。了解这一差距可以产生相当大的价值,确定可以进行的改进,如果积极主动地进行改进,我们可以学到很多东西来帮助推动系统的改进。这种从日常工作中学习的理念正在成为安全实践中的重要技术(Hollnagel,2018 年)。此外,工程系统安全评估 (SSA) 假设系统上的人类行为始终正确执行,并且没有将人为错误发生的可能性纳入“整个系统”风险评估中。安全分析假设人类行为始终是正确的,尽管数据告诉我们事实并非如此。因此,OEM 假设的人为可靠性与数据中显示的实际人为可靠性之间存在差距(并且仍然可能是保守的情况)。
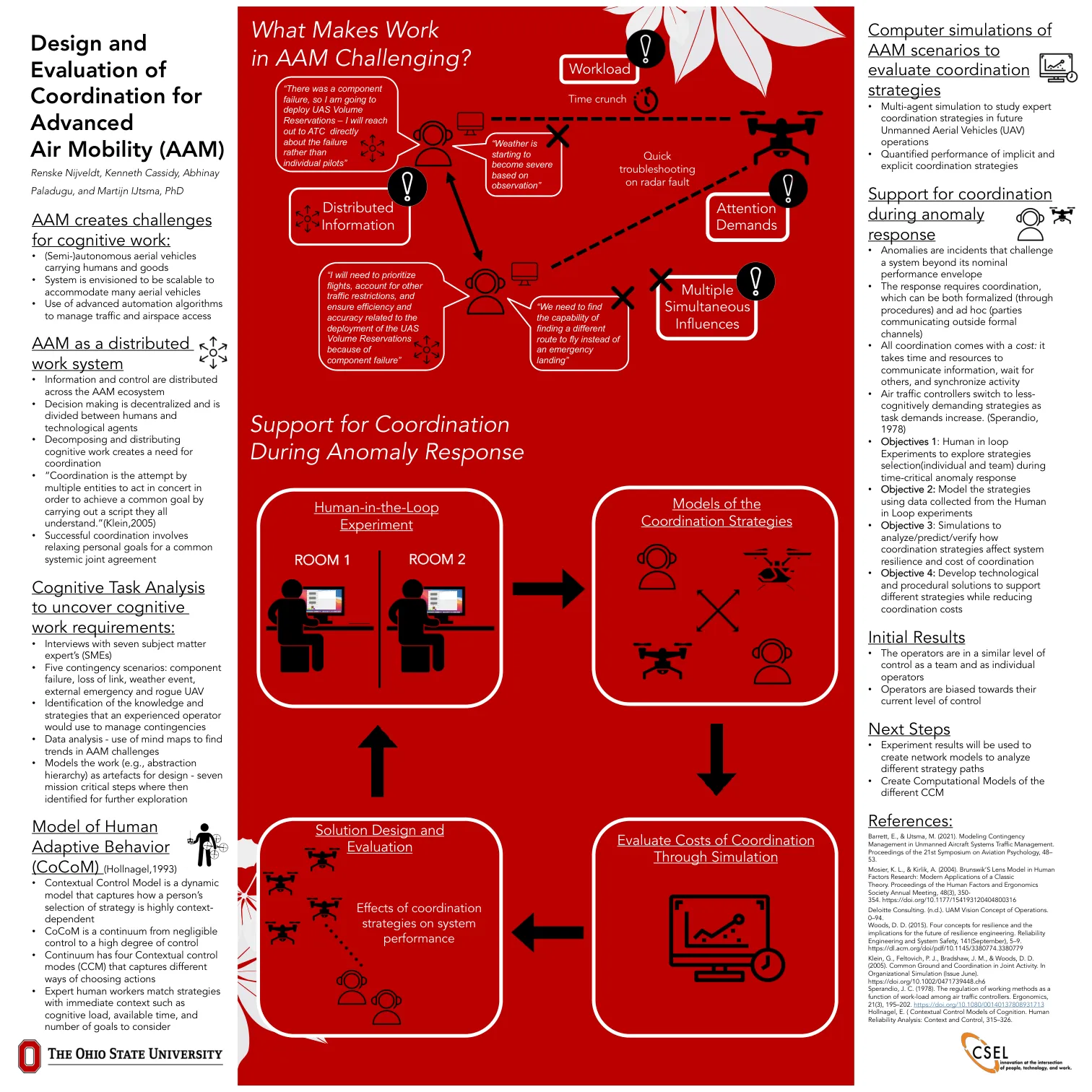
是什么让 AAM 的工作充满挑战?
Barrett, E., & IJtsma, M. (2021)。无人机系统交通管理中的应急管理建模。第 21 届航空心理学研讨会论文集,48–53。Mosier, K. L., & Kirlik, A.(2004)。Brunswik 的人为因素研究中的镜头模型:经典理论的现代应用。人为因素和人体工程学学会年会论文集,48(3),350-354。https://doi.org/10.1177/154193120404800316 Deloitte Consulting。(n.d.)。UAM 愿景运营概念。0–94。Woods, D. D. (2015)。四个弹性概念及其对弹性工程未来的影响。可靠性工程与系统安全,141(9 月),5–9。https://dl.acm.org/doi/pdf/10.1145/3380774.3380779 Klein, G., Feltovich, P. J., Bradshaw, J. M., & Woods, D. D. (2005)。联合活动中的共同点和协调。在组织模拟中(6 月刊)。https://doi.org/10.1002/0471739448.ch6 Sperandio, J. C. (1978)。空中交通管制员的工作方法与工作量的关系。人体工程学,21(3),195–202。https://doi.org/10.1080/00140137808931713 Hollnagel, E. (认知的情境控制模型。人类可靠性分析:情境与控制,315–326。

模拟空战的团队态势感知精度测量技术 - 感知与性能之间的曲线关系
态势感知 (SA) 已经取代传统的“方向舵和操纵杆”技能,成为空战中取胜的主要因素 (Endsley,1995;Svenmarckt 和 Dekker,2003)。态势感知通常被定义为一个人对当前状况的感知 (SA 级别 1)、对当前状况的理解 (SA 级别 2) 和对近期事件的预测 (SA 级别 3) 的三级结构 (Endsley,1995)。态势感知作为一个概念可能是有争议的。例如,Dekker 和 Hollnagel (2004) 将该概念描述为“民间模型”,并采用还原论方法,认为态势感知可以分解为可测量的具体组成部分 (例如决策、感知、理解和长期记忆)。他们还认为,态势感知不容易被证伪 (另见 Flach,1995)。即使承认 SA 确实存在,该概念的科学性仍有待商榷。例如,它存在于用户的认知中,还是更广泛系统的突发属性,以及最合适的测量方法是什么(有关更多详细信息,请参阅 Salmon 等人,2008 年;Endsley,2015 年;Stanton 等人,2017 年;Nguyen 等人,2019 年的广泛评论)?尽管如此,很明显,SA 的概念已成为评估系统和人类表现的重要指标。正如 Wickens (2008) 指出的那样“……人们可以说,该构造在理论和应用中的使用增加证明了

意识与
态势感知 (SA) 已经取代传统的“方向舵和操纵杆”技能,成为空战中取胜的主要因素 (Endsley,1995;Svenmarckt 和 Dekker,2003)。态势感知通常被定义为一个人对当前状况的感知 (SA 级别 1)、对当前状况的理解 (SA 级别 2) 和对近期事件的预测 (SA 级别 3) 的三级结构 (Endsley,1995)。态势感知作为一个概念可能是有争议的。例如,Dekker 和 Hollnagel (2004) 将该概念描述为“民间模型”,并采用还原论方法,认为态势感知可以分解为可测量的具体组成部分 (例如决策、感知、理解和长期记忆)。他们还认为,态势感知不容易被证伪 (另见 Flach,1995)。即使承认 SA 确实存在,该概念的科学性仍有待商榷。例如,它存在于用户的认知中,还是更广泛系统的突发属性,以及最合适的测量方法是什么(有关更多详细信息,请参阅 Salmon 等人,2008 年;Endsley,2015 年;Stanton 等人,2017 年;Nguyen 等人,2019 年的广泛评论)?尽管如此,很明显,SA 的概念已成为评估系统和人类表现的重要指标。正如 Wickens (2008) 指出的那样“……人们可以说,该构造在理论和应用中的使用增加证明了

尖端操作:人为错误的复杂性
医学和其他领域事故研究将大多数不良后果归咎于被称为人为失误的一类人类行为。例如,对手术室麻醉事故的调查显示,70% 到 82% 的事故归咎于人为因素(Chopra、Bovill、Spierdijk 和 Koornneef,1992 年;Cooper、Newbower、Long 和 McPeek,1978 年)。航空业的类似调查将 70% 以上的事故归咎于机组人员失误(波音产品安全组织,1993 年)。一般而言,各行业的事故调查将类似百分比的重大事件归咎于人为失误(例如,参见 Hollnagel,1993 年,表 1)。结果是,无论是专业人士还是普通人,都认为医学、航空、核能发电和类似领域存在“人为错误问题”。为了应对这种人为不可靠的现象,通常的做法是尝试通过执行标准做法和工作规则以及使用自动化将活动从人身上转移开来,以减少或规范人在危险系统中的作用。通常,当事件被归咎于人为错误时,所指的“人”是指一些个人或一组从业人员,他们在 Reason 所称的系统“尖端”工作(Reason,1990;图13.1)。尖端的从业人员实际上以飞行员、医生、航天器控制员或发电厂操作员的身份与危险过程互动。在医学领域,这些从业者包括麻醉师、外科医生、护士和一些技术人员,他们在身体和时间上都与患者关系密切。那些处于系统“钝端”的人,继续理性的类比,通过影响作用于尖端从业者的约束和资源来影响安全。钝端包括管理者、系统

经颅磁刺激刺激改善了空间记忆并调节阿尔茨海默氏病小鼠模型中海马神经振荡
神经薄缠结是与AD相关的病理过程(Yokoyama等,2022)。这些病理特征有可能破坏突触和神经元活性,从而导致各种大脑区域的网络异常(Casula等,2022; Luo等,2023; Pless等,2023)。在AD患者的大脑中,已经检测到了各种神经生理特征,包括Preduneus Cortex(Casula等,2023)中的过度兴奋性和小脑皮质可塑性机制的损害(Di Lorenzo等人,2020年)。这些异常的神经活动可能导致AD中的神经元网络功能障碍,从而导致认知障碍。海马是用于记忆编码,存储和检索的关键大脑区域,是AD病理学影响的最早区域之一(Gillespie等,2016; Caccavano等,2020)。研究人员在神经振荡中检测到与在AD患者和动物模型的海马区域中使用脑电图或局部领域(LFP)记录(LOUX和UHLHAAS,2014; MILLER等,2018; JAFARI; JAFARI; JAFARI和KOLB)的20220; JAFARI和KOLB的2020;进一步探讨了它们在AD病理学背景下的作用,这揭示了在AD治疗中进行干预的潜在机会(Chan等,2021; Traikapi和Konstantinou,2021)。海马含有重要的中间神经元人群,在驱动神经元同步中起着至关重要的作用(Da Crugz等,2020; He He等,2021)。γ振荡与动物和人类的记忆和认知有关,并且可能在各种频率范围内都存在功能区别(Moby和Colgin,2018年)。特定的,缓慢的γ振荡(25 Hz -50 Hz)被认为可以增强海马内的记忆检索过程(Zheng等,2016),随着涉及较高记忆需求的任务中的慢速伽马活性增加了(Rangel等人,2016年)。海马锋利波纹波(SWR)在支持记忆合并和重播中起着重要作用(Buzsaki,2015; Katsuki等,2022)。SWR的破坏会损害记忆性能(Aleman-Zapata等,2022),而通过光遗传学刺激延长SWR的持续时间可改善迷宫任务期间大鼠的记忆力(Fernández-Ruiz等人,2019年)。研究表明,海马γ振荡和AD中的SWR缺陷(Hollnagel等,2016; Klein等,2016; Witton等,2016; Benthem等,2020)。神经刺激是一种神经调节的方法,涉及将刺激(例如电气,磁性,光学和超声)传递到选定的大脑区域,以调节局部和网络范围内的神经元活性(Yuan等,2020)。经颅磁刺激刺激(TMA)是一种非侵入性工具的创新形式,可以使用低强度集中的超声刺激静态磁场内特定的大脑区域(Yuan and Chen,2016; Wang等,2019)。在2003年,诺顿提出了在静态磁场中使用超声刺激的想法(Norton,2003)。由脑组织内部超声引起的离子颗粒的运动将在静态磁场下形成洛伦兹力,而TMA允许磁性声音电场和超声波的联合作用(Wang等,2016; Yuan等,2016; Yuan等,2016)。值得注意的是,即使在深脑区域,TMA也可以为由于