XiaoMi-AI文件搜索系统
World File Search SystemLPV

国家感染控制指南和...
3TC - Lamivudine AZT - Zidovudine BHU - Basic Health Unit d4T - Stavudine HAI - Hospital Acquired Infections HBV - Hepatitis B virus HCV - Hepatitis C virus HCW - Healthcare workers HIV - Human Immunodeficiency Virus HLD - High Level Disinfection ILD - Intermediate Level Disinfection IPC - Infection control practices JDWNRH - JigmeDorjiWangchuck National Referral Hospital LPV/r - Lopinavir MoH - MoH ORC - Outreach Clinic PEP - Post-Exposure prophylaxis PI - Protease Inhibitor PPE - Personnel Protective Equipment's Psi - per square inch RRH - Regional Referral Hospital SARS - Severe Acute Respiratory Syndrome WHO - World Health Organization MRSA - Methicillin Resistant金黄色葡萄球菌ESBL-繁殖光谱β腹酶B.P-血压MDRO-多种耐药生物NDM-新德里Metalllo -Beta -beta -lactamase vre-耐万古霉素的抗肠球菌

第 5 版 SESAR 解决方案 #10 优化路线网络...
“将基于性能的导航 (PBN) 用于航路分离目的”项目考虑了在航路中战略性地消除交通冲突,这些交通流间隔紧密,并利用了支持此解决方案的 FRT 功能。“在 TMA 中全面实施 P-RNAV”项目调查了在 TMA 中全面实施 P-RNAV(横向性能与 RNAV1 相同);但是,尽管该项目调查了作为提议解决方案一部分的点合并的应用,但飞机功能不包括“机载性能监控和警报”和半径到定位点 (RF) 转弯性能。对于进近阶段,项目“带垂直引导的进近程序 (APV)”研究了一种支持这些操作的可能方法。该项目研究了由卫星增强支持的带垂直引导 (APV) 的进近程序,并飞到具有垂直引导 (LPV) 最低限度的定位器性能。后面提到的两个项目都专注于 TMA 操作,而第一个项目仅研究了途中操作。下图 2 总结了三个相关项目之间的相互作用,但并未突出不同概念的连接问题。

ATR 升级服务
第二个 ADF 安装 85 第二个无线电高度表 86 备用高度表压力单位更改 87 陡坡进近能力 88 气象雷达 89 ETOPS 120' 能力 90 T 2 CAS 安装 91 T 3 CAS 安装 92 T 3 CAS 中 ADS-B 输出 DO-260B 激活 93 T 3 CAS 中额外呼叫激活 94 反应性风切变激活 (RWS) 95 单个 HT1000 GNSS 安装 96 带 GNSS 的 P-RNAV 97 带 GNSS 的 RNP 进近 98 ADS-B 输出 DO260(新航空电子设备套件) 99 ADS-B 输出 DO260A(传统航空电子设备) 100 ADS-B 输出 DO260B(传统航空电子设备) 101 ADS-B 输出 DO260B(新航空电子设备套件) 102 第二个 SBAS GPS 安装103 垂直导航 (VNAV) 104 垂直引导 (LPV) 的航向道性能 105 RNP AR 0.3/1 能力 106 RNP AR 0.3/0.3 能力 107 SkyLens ™ 头戴式显示器 (HDM) 108 增强型视景系统 (EVS) 109

层次运动计划和离线稳健模型的自动驾驶预测控制
摘要 - 在恶劣条件下在复杂情况下驾驶车辆是自动驾驶汽车(AV)的最大挑战。为了解决这个问题,我们在复杂的场景中使用前主动转向系统提出了层次运动计划和稳健的控制策略,并在各种湿滑的道路粘附系数中,同时考虑车辆不确定的参数。通过智能驾驶员模型(IDM)考虑并以车辆跟随模型的形式考虑人类车辆(HVS)的行为(HVS)。然后,在上层中,运动计划者首先使用人工电位场(APF)算法来生成最佳轨迹,例如,路标,边界和静态/动态障碍物,例如道路标记,边界和静态/动态障碍。为了在下层跟踪生成的最佳trajectory,通过应用线性矩阵不等式(LMI)优化方法,使用线性参数变化(LPV)系统来实现离线约束的输出反馈鲁棒模型预测性控制(RMPC),以确保对模型参数的鲁棒性不适合模型不限制。更重要的是,通过增强系统模型,我们提出的方法称为离线RMPC,与三种现有的RMPC方法相比,具有出色的效率,例如,偏置式挡板offline RMPC,在线rmpc,在线rmpc和离线rmpc无需增强模型(离线rmpc w/o am),在不线rmpc w/o am)(均改进了计算时间),并改进了计算时间和添加时间。
ARAIM 技术小组 - 里程碑 2 报告 - GPS
本报告的目标: 2004 年签署的美国-欧盟 GPS-伽利略合作协议为美国和欧盟在卫星导航领域的合作活动确立了原则。该协议预见到一个工作组来促进在下一代民用卫星导航和授时系统的设计和开发方面的合作。这项工作成为工作组 C (WG-C) 的重点。WG-C 的目标之一是开发基于 GPS-伽利略的生命安全服务应用。为此,WG-C 于 2010 年 7 月 1 日成立了 ARAIM 技术小组 (ARAIM TSG)。ARAIM TSG 的目标是在双边基础上研究 ARAIM(高级接收机自主完整性监控)。进一步的目标是确定 ARAIM 是否可以成为支持全球空中导航的多星座概念的基础。具体而言,ARAIM 应支持航路和终端区飞行;它还应支持机场进近操作期间的横向和垂直引导。在这些操作中,航空的全球进近引导是最雄心勃勃的目标。这些飞机操作被称为水平导航的定位器精度 (LP) 和垂直导航的定位器精度垂直 (LPV)。LPV-200 表示,这种引导应支持低至接地点以上 200 英尺高度的决策高度 (DA) 的进近操作。ARAIM TSG 重点关注
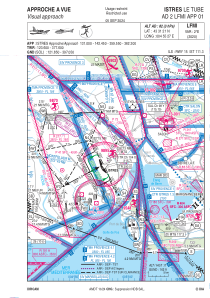
目视进近 目视进近 ISTRES LE TUBE AD 2 LFMI APP 01
TWY A1、C3 和 D:限制使用 ACFT 代码字母 C TWY B1:限制使用 ACFT 代码字母 B TWY C、E:在 ATC 许可下限制使用 ACFT 代码字母 D、E 和 F TWY C1、C3、C4:预防性滑行。从 TWR / 滑行处看不到,请小心。从 TWR TWY 看不到 C4:仅限 ACFT 代码字母 E TWY 进入 D1:仅限 ACFT 代码字母 A TWY 进入 F:不适用于 LPV DEP RWY 15 TWY L、M:仅限 FR MIL ACFT 代码字母 A TWY 进入 N:除授权的 MIL FR ACFT 外不可用 - 预防性滑行 20 kt MAX(强度未知的侧板,夜间照明位于 TWY 边缘 7 米处)/除允许的法国 MIL ACFT 外禁止,小心滑行 20 kt MAX(强度未知的沟壑,距离 TWY 边缘 7 米处的非标准照明)THR:180 米混凝土 - 仅限 ACFT 字母代码 D、E 和 F 进入:仅在混凝土 THR / 180 米混凝土上的 RWY 上调头- 仅限 ACFT 代码字母 D、E 和 F 进入:跑道上的转弯区域仅在混凝土 THR 上获得批准

双级控制体系结构,用于过度驱动自动驾驶汽车的稳定性,路径和能源经济
摘要 - 配备了四个独立的轮毂电动机的自主车辆,赋予了有益的设计灵活性,并使系统过度插入。扭矩分配渗透的策略决定了系统的性能,并标志着其能耗。在本文中,从车辆性能和能源消耗的角度开发了两个完整的新型控制体系结构。通过合并两个不同的控制水平来采用级联的控制策略。高级通过基于线性参数变化(LPV)系统框架中的最佳H∞控制的集中式方法来区分,以及基于问题解耦的分散方法,其中提出了使用超级扭转滑动滑动模式(STSM)控制的解决方案。两种方法均由决策层监督,以促进关键驾驶情况下的稳定目标。在低级别,使用原始扭矩分配策略实现了基于直接偏航控制(DYC)以及速度控制的稳定性控制。已经设计了一组全面的多四个多目标策略,以提议的扭矩分配配置为中心。这些策略涵盖了动态在线优化,使用高效的顺序二次编程(SQP)方法进行了专业解决,以及基于数据驱动的算法的唯一离线优化。在Simulink/Matlab和Scaner TM Studio车辆动力学模拟器之间的关节模拟中,对所提出的架构进行了测试和验证。模拟结果表明,在自动驾驶的轮驱动电动汽车的高水平和低水平上,稳定性,稳定性和能源效率都有很大的提高。
欧盟与美国在卫星导航方面的合作 - GPS
ARAIM 小组的起源和目标 2004 年签署的美国-欧盟 GPS-伽利略合作协议为美国和欧盟在卫星导航领域的合作活动确立了原则。该协议预见到一个工作组来促进在下一代民用卫星导航和授时系统的设计和开发方面的合作。这项工作成为工作组 C (WG-C) 的重点。WG-C 的目标之一是开发用于生命安全服务的 GPS-伽利略综合应用程序。为此,WG-C 于 2010 年 7 月 1 日成立了 ARAIM 技术小组 (ARAIM SG)。ARAIM SG 的目标是在双边基础上研究 ARAIM(高级接收机自主完整性监测)。进一步的目标是确定 ARAIM 是否可以成为支持全球空中导航的多星座概念的基础。具体来说,ARAIM 应该支持航路和终端区飞行;它还应支持进近操作期间的横向和垂直引导。在这些目标中,全球航空垂直引导是最雄心勃勃的目标。这些飞机操作称为定位器精密垂直或 LPV。LPV-200 表示这种引导应支持低至 200 英尺高度的进近操作,ARAIM SG 专注于支持全球 LPV-200 的 ARAIM 架构。该文件是三阶段工作中的第一个里程碑报告。它提供:ARAIM 概述、第 1 阶段的成就和后续步骤。该报告由来自美国联邦航空管理局 (FAA)、斯坦福大学 (SU)、MITRE 公司、伊利诺伊理工学院 (IIT)、德国航空航天中心 (DLR)、慕尼黑联邦航空学院 (UniBW)、欧洲空间局 (ESA) 和欧盟委员会 (EC) 的 ARAIM SG 成员编写。ARAIM 概述如上所述,ARAIM 必须确保航路飞行、终端和进近操作的导航完整性。对于后者,它必须在几秒钟内检测到底层全球导航卫星系统 (GNSS) 中的所有危险故障。用空中导航的语言来说,ARAIM 必须确保在导航传感器误差大于一定量(目前 LPV-200 为 35 米)之前,在出现任何危险误导信息 (HMI) 的六秒内警告飞行员。报告第 2 节确定了其他辅助条件。ARAIM 旨在支持空中导航数十年。因此,ARAIM 必须具有灵活性,以便空中导航不会对底层全球导航卫星系统(例如 GPS、伽利略、GLONASS、北斗/指南针等)的健康状况产生脆弱的依赖。因此,ARAIM 必须允许飞行员使用新的卫星和星座。它必须自动补偿这些新卫星和星座的故障率。对于新卫星和星座,这些故障率预计会很高
重型电动汽车中锂离子电池的建模,参数识别和老化敏感的管理
电池是对完整电动汽车(EV)的成本和环境足迹产生重大影响的组件。因此,有强大的动力可以最大化其利用率。用法限制由电池管理系统(BMS)执行,以确保安全操作并限制电池降解。限制往往是保守的,以说明电池状态估计的不确定性以及由于老化而导致的电池特性变化。为了提高利用率,需要对衰老敏感的电池管理。这是指管理策略,该策略是a)根据其状态调整电池期间的寿命,b)根据特定应用程序的要求平衡利用率和退化之间的权衡。在最新的电池安装中,仅测量了三个信号;电流,电压和温度。但是,必须估计的其他州(例如其最先进的(SOC)或局部浓度和潜力)对电池的行为进行了政府。因此,BMS依靠模型来估计状态并执行控制动作。为了实现点a)和b),必须在船上更新用于状态估计和控制的模型。更新的型号还可以实现诊断电池的目的,因为它反映了电池老化电池的变化。本论文研究了从操作EV数据中识别电化学和经验蝙蝠模型的鉴定。此外,IT研究了基于模型的最佳和自适应快速充电策略。工作分为四个主要研究。1)在驾驶数据上鉴定了经验线性参数变化(LPV)动态模型。模型参数是作为测得的温度,电流幅度和估计的开路电压(OCV)的功能提出的。处理电池电压响应的时间尺度差异,采用了连续的时间系统识别。我们得出的结论是,与离散和时间不变的对应物相比,所提出的模型具有较高的预测能力。2)对高阶电化学模型的参数进行了全局灵敏度分析。用实际电动汽车的测量电流曲线用作输入,并且评估了参数对建模细胞电压和其他内部状态的影响。研究表明,为了激发所有模型参数,需要高电流率,较大的SOC跨度以及更长的电荷或放电期的输入。这仅在电动卡车的数据集中存在,该电池组很少。来自带有更多包装(电动总线)和有限的SOC操作窗口(插电式混合动力卡车)的车辆的数据集激发了更少的模型参数。3)我们还投资了设计充电电流以增加其有关模型参数的信息内容,而不是使用驱动数据来参数化模型。这是在频域中作为最佳实验设计问题的提法。基于等效电路模型(ECM)状态优化了对衰老敏感的快速充电过程。最后,结合最佳快速电荷和
WAAS 性能标准 - GPS
美国全球定位系统 (GPS) 标准定位服务 (SPS) 由绕地球运行的航天器产生的空间定位、导航和授时 (PNT) 信号组成,这些信号免费提供给全球民用、商业和科学用途。广域增强系统 (WAAS) 为 GPS 提供增强信号,免费提供给用户,该信号提供校正和完整性信息,旨在改善美国 (U.S.) 和加拿大和墨西哥部分地区的定位导航和授时 (PNT) 服务。WAAS 是符合国际民用航空组织 (ICAO) 标准的天基增强系统 (SBAS) 的首次运营实施。此 WAAS 性能标准 (WAAS PS) 指定了使用 GPS SPS 广播信号和 WAAS 增强信号的适当装备用户可用的导航性能级别。美国政府致力于满足本 WAAS PS 中规定的最低服务水平。有关 USG 对 GPS SPS 承诺的具体信息,请参阅 GPS SPS PS。自 WAAS 于 2003 年投入使用以来,实际性能通常达到并超过了本 WAAS PS 中规定的最低准确性、完整性、连续性和可用性性能要求,因此用户通常可以期望性能高于此处描述的最低水平。美国联邦航空管理局 (FAA) 在线提供实际实时性能、统计性能和实时数据。GPS 和 WAAS 的季度性能分析报告也可在 FAA 技术中心 WAAS 测试平台网站 ( http://www.nstb.tc.faa.gov/ ) 上找到。有兴趣的读者可以参考此网站和其他来源,了解最新的 GPS 和 WAAS 性能信息。请注意,基于 WAAS 的垂直定位器性能 (LPV) 引导程序的数量现已超过美国的仪表着陆系统 (ILS) 程序的数量。GPS 未来将提供三种新的现代化民用信号:L2C、L5 和 L1C。借助 L5 上的附加信号,机载接收器将能够校正视线电离层传播延迟误差。这种双频 (L1/L5) 操作模式将允许对基于 GPS 的增强服务(例如 WAAS)的交付进行更改,但本性能标准不考虑这些未来的变化。此 WAAS 性能标准仅适用于 L1 (1575.42 MHz) 粗/捕获 (C/A) 信号和地球静止卫星 (GEO) 广播的 WAAS 空间信号 (SIS) 的 WAAS 增强型 GPS SPS 用户。WAAS PS 将根据需要进行更新,以反映 WAAS 增强服务的重大变化。除了 WAAS PS,读者还可以参考 GPS SPS PS 和 FAA 技术标准命令 (TSO)-145/146,以了解基本 GPS SPS 服务和 WAAS 接收器设备的详细信息。WAAS 还符合或超过了 ICAO 附件 10,全球导航卫星系统 (GNSS) 卫星增强系统 (SBAS) 的标准和建议做法 (SARP)。