XiaoMi-AI文件搜索系统
World File Search SystemMATLAB
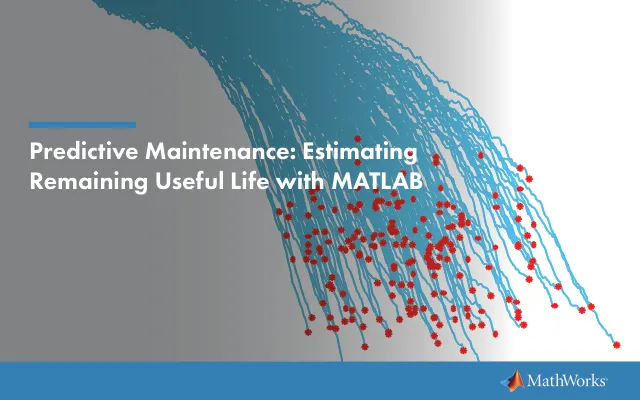
使用 MATLAB 估算剩余使用寿命 | OPENCADD
开发预测性维护模型的第一步是获取数据。此示例使用 NASA 数据存储库中公开提供的预测和健康管理挑战数据集。该数据集包括来自 218 个发动机的运行至故障数据,其中每个发动机数据集包含来自 21 个传感器的测量值。通过放置在发动机各个位置的传感器收集燃油流量、温度和压力等测量值,以向控制系统提供测量值并监控发动机的健康状况。该图显示了一个传感器对所有 218 个发动机的测量结果。
MATLAB 中的神经网络和学习算法 - 电子书
© 编辑(如适用)和作者,根据 Springer Nature Switzerland AG 2022 的独家许可,2023 年更正出版 本作品受版权保护。所有权利均由出版商独家和独家授权,无论涉及全部或部分材料,特别是翻译、重印、重复使用插图、朗诵、广播、在微缩胶片或任何其他物理方式上复制、传输或信息存储和检索、电子改编、计算机软件或现在已知或今后开发的类似或不同的方法的权利。使用一般描述性名称、注册名称、商标、服务标记等。本出版物中的这些名称即使在没有具体声明的情况下也不意味着这些名称不受相关保护法律和法规的约束,因此可以免费使用。出版商、作者和编辑可以放心地认为,本书中的建议和信息在出版之日是真实准确的。出版商、作者或编辑均不对本书所含材料或可能出现的任何错误或遗漏提供明示或暗示的保证。出版商对已出版地图和机构隶属关系中的司法权主张保持中立。

Matlab 与 FlightGear 联合仿真用于飞机识别与控制
过去几年,价格实惠的(X-Plane 1)或免费提供的(FlightGear 2)真实飞行模拟软件取得了长足进步。这两个程序都保证了很高的真实度,甚至用于飞行员的训练驾驶舱。FlightGear 提供了几种成熟的飞行动力学模型(FDM)供您选择,这些模型大多基于非线性运动方程,如 JSBSim(Berndt (2004))或用户定义模型。这在使用高度专业化的飞机(如轻于空气的飞机)或有自定义方程组可用时非常有用,而 FlightGear 仅用于可视化目的并提供真实的环境条件。这种方法的缺点是用户必须提供 FDM 中使用的所有系数,包括对不同飞行参数的参数化以提高真实感。
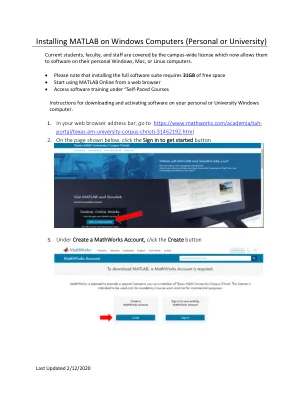
在 Windows 计算机(个人或大学)上安装 MATLAB
目前,学生、教师和工作人员都受校园范围许可证的保护,该许可证现在允许他们在个人 Windows、Mac 或 Linux 计算机上使用软件。 • 请注意,安装完整软件套件需要 31GB 的可用空间 • 从 Web 浏览器开始使用 MATLAB Online • 访问“自定进度课程”下的软件培训 有关在您的个人或大学 Windows 计算机上下载和激活软件的说明。 1. 在您的 Web 浏览器地址栏中,转到 https://www.mathworks.com/academia/tah-
MATLAB 中的神经网络和学习算法 - 电子书
© 编辑(如适用)和作者,经 Springer Nature Switzerland AG 独家授权,2022 年更正出版 本作品受版权保护。所有权利均由出版商独家和独家授权,无论涉及全部或部分材料,特别是翻译、重印、重复使用插图、朗诵、广播、在缩微胶片或任何其他物理方式上复制、传输或信息存储和检索、电子改编、计算机软件或现在已知或今后开发的类似或不同的方法的权利。本出版物中使用的一般描述性名称、注册名称、商标、服务标记等并不意味着,即使没有具体声明,这些名称也不受相关保护法律和法规的约束,因此可以免费用于一般用途。出版商、作者和编辑可以放心地假设本书中的建议和信息在出版之日被认为是真实和准确的。出版商、作者或编辑均不对本文所含材料或可能出现的任何错误或遗漏提供明示或暗示的保证。出版商对于已出版地图中的司法管辖权主张和机构隶属关系保持中立。

使用MATLAB
摘要:最有身体上挑战的人依靠他人进行运动,而这样的人的数量日益增加。手动轮椅很难被身体挑战的人操作,因为他们需要运动的力量。为了克服这一缺点,市场上有传统的轮椅或动力轮椅。即使他们打算为用户的舒适设计设计,他们很昂贵,因此并非每个受到身体挑战的人都能负担得起。以减少手动轮椅使用的百分比,并以负担得起的方式为身体挑战的人们提供更好的体验和舒适感,我们提出了这一模型。我们提出的模型基于神经网络,而反向传播算法用作训练由用户语音命令训练的人工神经网络的媒介,因此它将语音识别用作控制机制。所提出的原型接受了五个语音命令,例如(向前,向后,左,右和停止)。这些语音命令已成功识别并转换为文本。通过使用蓝牙模块来控制直流电动机来控制轮椅的方向,以下文本将进一步写在目标硬件上。整个原型都是在Matlab R2020A和Arduino Uno上设计为目标硬件的。我们拟议的工作的主要目的是开发一个智能轮椅,该轮椅克服现有系统的问题,对于身体挑战的人来说应该容易,印象深刻且方便。

飞机 变桨 运动 系统 控制器 设计 与 MATLAB 仿真
1.3 目标................................................................................................................ 3

使用 MATLAB GUI 进行移动物体检测和跟踪...
摘要:移动物体检测和跟踪是安全应用之一,由于其在视频监控、交通监控和图像识别等领域的应用,引起了计算机视觉研究人员的极大兴趣。移动物体检测涉及在连续帧中识别物体,而物体跟踪用于监控相对于感兴趣区域的移动。在这项研究工作中,GUI(图形用户界面)是使用 MATLAB 中的 Guide 创建的,它提供软件应用程序的点击控制,无需学习语言或输入命令即可运行应用程序。本文使用基于高斯混合模型的背景减法算法进行物体检测,该算法可以处理背景强度分布的较大变化,并使用卡尔曼滤波器进行视频跟踪,该滤波器使用随时间观察到的一系列测量值,包含统计噪声和其他不准确性,并产生未知变量的估计值,这些估计值往往比仅基于单个测量的估计值更精确,在物体周围绘制一个边界框以跟踪视频帧中移动的移动物体,每帧中物体的计数值显示在 MATLAB 命令窗口中。在这里,MATLAB 与 Arduino 板(基于微控制器的板)连接,该板与 LED 连接,根据计数值,LED 的数量将发光。MATLAB 的计数值通过串行通信与 Arduino 板通信。关键词:移动物体检测、跟踪、指南、MATLAB、LED、Arduino、串行通信。
使用 MATLAB GUI 进行运动物体检测和跟踪...
摘要:移动物体检测和跟踪是安全应用之一,由于其在视频监控、交通监控和图像识别等领域的应用,引起了计算机视觉研究人员的极大兴趣。移动物体检测涉及在连续帧中识别物体,而物体跟踪用于监控相对于感兴趣区域的移动。在本研究中,使用 MATLAB 中的 Guide 创建了 GUI(图形用户界面),它提供软件应用程序的点击控制,无需学习语言或输入命令即可运行应用程序。在本文中,使用基于高斯混合模型的背景减法算法执行物体检测,该算法可以处理背景强度分布的较大变化,使用卡尔曼滤波器执行视频中的跟踪,该滤波器使用随时间观察到的一系列测量值,包含统计噪声和其他不准确性,并产生未知变量的估计值,这些估计值往往比仅基于单个测量值的估计值更精确,在物体周围绘制一个边界框以在物体在视频帧中移动时跟踪移动物体,每帧中物体的计数值显示在 MATLAB 命令窗口中。这里 MATLAB 与 Arduino 板(基于微控制器的板)连接,Arduino 板与 LED 连接,根据计数值 LED 的数量会发光。MATLAB 的计数值通过串行通信与 Arduino 板通信。关键词:移动物体检测、跟踪、引导、MATLAB、LED、Arduino、串行通信。
使用 MATLAB 中的 QSS 和 ADVISOR TOOLBOX 进行 EV 建模
使用 QSS 工具箱在 MATLAB 中进行 EV 建模 为了在 matlab 中建模,我们需要指定我们要设计的车辆的一些参数。