XiaoMi-AI文件搜索系统
World File Search SystemMatsya
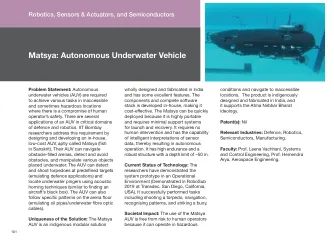
自动驾驶水下车辆-Matsya -IIT孟买
问题陈述:需要自动驾驶水下车辆(AUV)才能在无法访问人类操作员安全妥协的无法访问,有时甚至有害的位置实现各种任务。在国防和机器人技术的关键领域中有几种应用。bombay研究人员通过设计和开发内部,低成本的AUV,恰当地称为Matsya(梵语中的鱼)来解决这一要求。他们的AUV可以在充满障碍的竞技场,检测和避免障碍物,并操纵将各种物体放在水下。AUV可以以预定义的目标(模拟防御应用)检测和射击鱼雷,并使用声学归巢技术(类似于找到飞机的黑匣子)来定位水下平台。AUV还可以遵循竞技场地板上的特定图案(模拟油管/水下光纤电缆)。

Matsya 6d的技术设计报告,自动水下车辆
摘要 - 对于RoboSub 2024,AUV-IITB团队正在采取行动Mastya 6d,具有新的驱动系统,可靠的电气堆栈和全新的代码库。考虑到要采摘的物体的多功能性,设计了一种使用软机器人技术的抓手。鱼雷射击器变得更简单,更容易重新加载。现有的Subconn连接器被我们的内部连接器代替,以便在测试和提高速度时易于使用。使功能板变小,并合并了高度的冗余,以确保运行平稳。更改了摄像头,以提供更广阔的视野,更明亮的进料和高数据传输速率。最重要的是,整个软件体系结构都经过改进以使用Python而不是C ++,从而利用其广泛的图书馆支持和提高可读性。最后,在车辆上进行了广泛而严格的测试,以确保所有功能都经过了良好的测试和能力。

作为 Pradhan Mantri Matsya Sampada Yojana (PMMSY) 计划的一部分,在全国范围内为 10 万艘海洋渔船推出船舶通信和支持系统
班加罗尔,9 月 3 日:全国范围内的船舶通信和支持系统推广工作正在顺利推进,该系统旨在分阶段在机械化和机动化渔船上安装近 10 万台 MSS 终端 (Xponder)。NewSpace India Limited (NSIL) 是印度政府 (GoI) 太空部 (DoS) 下属的一家公司,也是印度空间研究组织 (ISRO) 的商业部门,该公司代表印度政府渔业部 (DoF)、渔业、畜牧业和奶业部牵头开展这一雄心勃勃的项目。该计划的重点是建立一个专用的移动卫星服务 (MSS) 网络,用于监测、控制和监视 (MCS) 9 个沿海州和 4 个联邦属地的近 10 万艘渔船。


海藻种植和利用
印度已成为鱼类生产的全球领导者,是最大的内陆捕获生产国,第六大海洋捕获生产国,也是第二大水产养殖生产商。该国的渔业无情地朝着面向耕种的未来发展。在养殖资源中,海藻在该国的水产养殖未来中找到了一个主要的位置。海藻是一群高价的海洋大藻类,具有许多生态,社会和经济利益。它们具有多种应用,包括作为琼脂,藻酸盐,琼脂糖和角叉菜胶等生化物质的原材料,以及食品,酶,药物,动物饲料,动物饲料,肥料,化妆品,纺织品,纺织品和生物技术学。它们还通过用作碳汇,有效地隔离了大气二氧化碳,从而有助于气候变化的过程。认识到印度的海藻种植和副产品行业的潜力,印度渔业部的Pradhan Mantri Matsya Sampada Yojana(PMMSY)已分配了Rs的预算。640千万卢比,用于发展海藻种植。640千万卢比,用于发展海藻种植。
印度政府渔业部,畜牧业和奶业部
渔业是一个州的主题,每个沿海国家/工会领土(UT)都有其自己的海洋捕鱼法规法案(MFRA),用于监管从海岸线上最高12海里的领土上的捕鱼活动,而印度独家经济区(EEEZ)地区(EEZ)领域(EEZ)超过12海里,超过12条海里。印度政府(DOF,GOI)渔业部通过各种计划和渔业和水产养殖的发展来补充各州/UT的努力。dof,GOI正在实施旗舰计划,即“ Pradhan Mantri Matsya Sampada Yojana(PMMSY)”,具有生态健康,经济上可行且具有社会包容性渔业部门的愿景,这些部门以可持续和负责的方式为渔民的经济繁荣和福祉做出贡献。在PMMSY下,印度整个海岸线的政府首次支持海洋牧场和人造礁的安装,以增强鱼类的股票和支持渔民的生计。在PMMSY下还促进了包括海藻种植在内的马养殖活动,以降低近岸水域的捕鱼压力并增强海洋生产。咨询会不时向沿海州/UT发出,以防止少年捕鱼和促进可持续的捕鱼实践。此外,采取了措施除外,以确保海水中的可持续渔业:

指定一个机构进行差距分析...
▪ 协议 - 如附表 2 所定义 ▪ 协议价值 - 如附表 2 所定义 ▪ 适用法律 - 如附表 2 所定义 ▪ 投标人 - 如条款 2.1.1 所定义 ▪ 任务 - 如条款 3.1.4 所定义 ▪ 合伙人 - 如条款 2.3.3 所定义 ▪ 授权代表 - 如条款 2.13.3 所定义 ▪ 授权 - 如条款 1.1.1 所定义 ▪ 投标保证金 - 如条款 2.20.1 所定义 ▪ 工程量清单 (BoQ) - 如条款 2.15.1 所定义 ▪ 资格条件 - 如条款 2.2.1 所定义 ▪ 利益冲突 - 如条款 2.3.1 所定义 ▪ 咨询团队 - 如条款 2.1.4 所定义 ▪ 咨询师 - 如条款 1.2 所定义 ▪ CSC - 公共服务中心 ▪ CV - 简历简历 ▪ 生效日期 - 如附表 2 所定义 ▪ 合格任务 - 如条款 3.1.4 所定义 ▪ 最终评估报告 - 如附表 1 第 5 段所定义 ▪ 财务提案 - 如条款 2.15.1 所定义 ▪ 协议形式 - 协议形式如附表 2 所定义 ▪ FDG - 焦点小组讨论 ▪ INR, Re, ₹, Rs - 印度卢比 ▪ 关键日期 - 如条款 1.8 所定义 ▪ 关键人员 - 如条款 2.1.4 所定义 ▪ 牵头成员 - 如条款 2.1.1 所定义 ▪ LOA - 授予书 ▪ 官方网站 - 如条款 1.11.2 所定义 ▪ 人员 - 如附表 2 所定义 ▪ 禁止行为 - 如条款 4.3 所定义 ▪ 项目经理 - 如附表 2 所定义 ▪ 提案 - 如条款 1.2 所定义 ▪ PDD -提案截止日期 ▪ PMMSY - Pradhan Mantri Matsya Sampada Yojana ▪ RFP - 定义见免责声明 ▪ 中标人 - 定义见第 1.6 条 ▪ 选择流程 - 定义见第 1.6 条 ▪ 服务 - 定义见附表 2 ▪ 独资公司 - 定义见第 2.1.1 条 ▪ 法定审计师 - 根据适用法律任命的审计师 ▪ 团队负责人 - 定义见第 2.1.4 条 ▪ 技术提案 - 定义见第 2.14.1 条