机构名称:
¥ 2.0
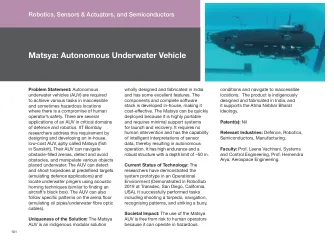
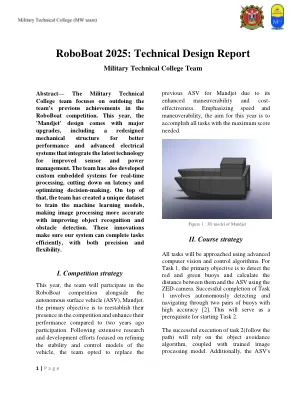
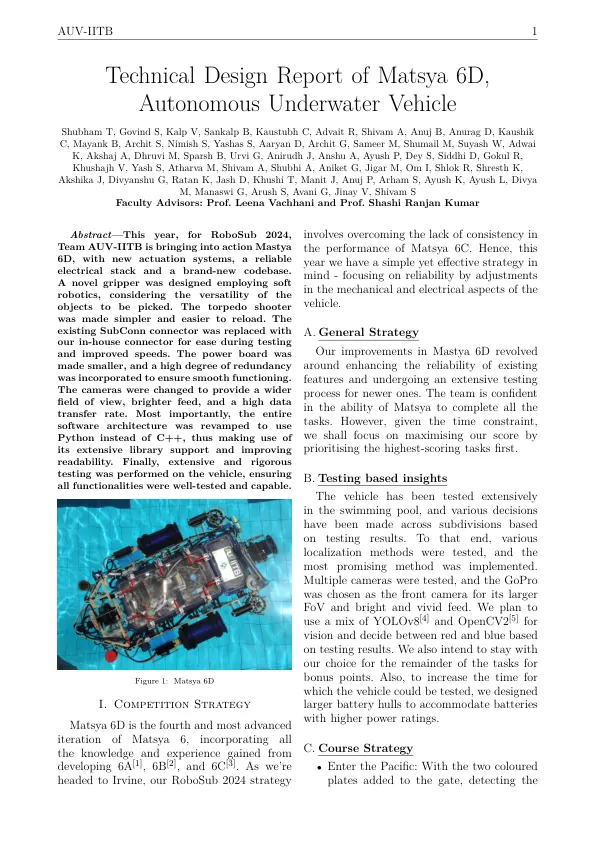
摘要 - 对于RoboSub 2024,AUV-IITB团队正在采取行动Mastya 6d,具有新的驱动系统,可靠的电气堆栈和全新的代码库。考虑到要采摘的物体的多功能性,设计了一种使用软机器人技术的抓手。鱼雷射击器变得更简单,更容易重新加载。现有的Subconn连接器被我们的内部连接器代替,以便在测试和提高速度时易于使用。使功能板变小,并合并了高度的冗余,以确保运行平稳。更改了摄像头,以提供更广阔的视野,更明亮的进料和高数据传输速率。最重要的是,整个软件体系结构都经过改进以使用Python而不是C ++,从而利用其广泛的图书馆支持和提高可读性。最后,在车辆上进行了广泛而严格的测试,以确保所有功能都经过了良好的测试和能力。
Matsya 6d的技术设计报告,自动水下车辆
主要关键词
相关文件推荐