机构名称:
¥ 1.0
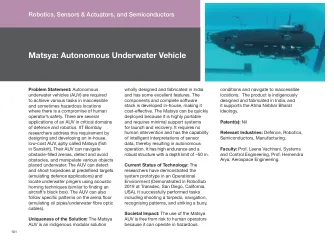
摘要。本文描述了自动水下车辆的控制系统的设计Edysys1。与远程操作的车辆(ROV)相比,一辆无人驾驶的水下车辆是一种无人驾驶的且自行的水下船只,可以独立运行,并执行几项分配给它的任务,该任务通常被束缚在船上或其他系泊的水车上。自主水下车辆的控制系统的智能设计是一个积极的研究领域,赋予对自治的需求和智能系统满足此类需求的能力。一个控制系统是用Raspberry Pi 4计算机设计为主控制单元的。通过车辆采集数据采集的各种子系统和传感器由Raspberry Pi 4控制,该覆盆子PI 4具有配置的机器人操作系统(ROS)。使用Python编程语言配置控制每个传感器的必要智能。此后,相关的python脚本在ROS框架中作为节点实现。通过调用ROS中的相关节点,通过ROS环境中的设计系统获得了各种感觉数据值。还实现了通过洛拉的成功沟通。
自动水下车辆的控制系统的设计Edysys1
主要关键词
相关文件推荐