机构名称:
¥ 1.0
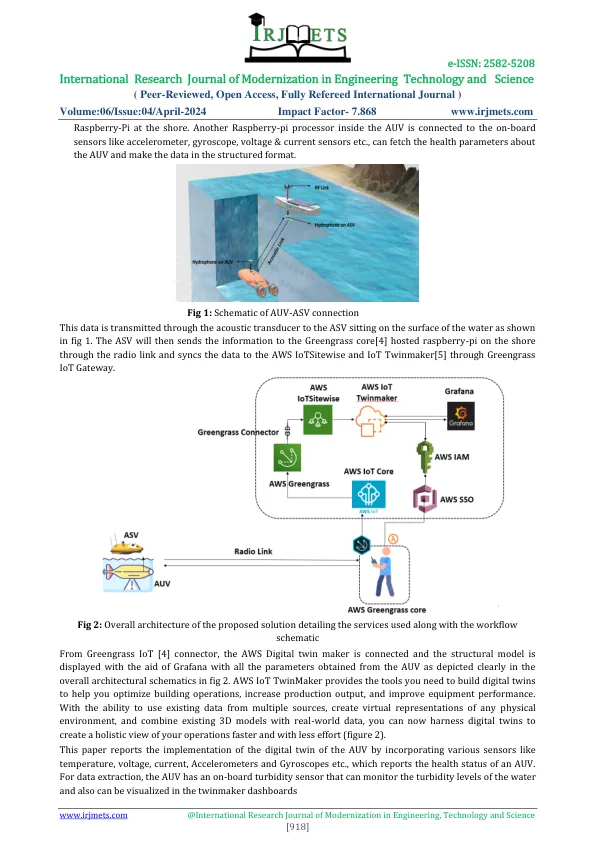
自动驾驶汽车(AUV)是海洋学和军事目的的主要研究工具。这些车辆的建造资本更大,一旦部署在海洋中,它就失去了与陆地世界的所有连通性,并且很难预测AUV的工作状态和健康状况,这不仅会阻碍AUV的透明度,而且还会蚀至现实时代的数据提取能力。本文通过部署与AUV同步移动并在水下与AUV连接的自动型表面车辆(ASV)专门解决了此问题。因此,通过集成IOT Twin Maker Service(Amazon Web Services(AWS)提供的数字双技术服务)来可视化提取的健康和监视数据。此外,可以通过插入AWS提供的Edge Computing软件来实现本地处理数据并进行现场决策的能力。结果描述了AUV的数字双胞胎模型以及其实时健康状况。
自动水下车辆的数字双辅助
主要关键词



相关文件推荐