机构名称:
¥ 2.0
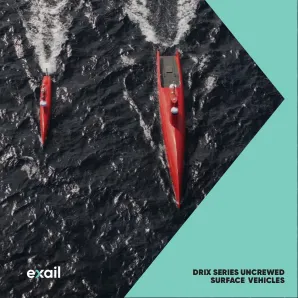
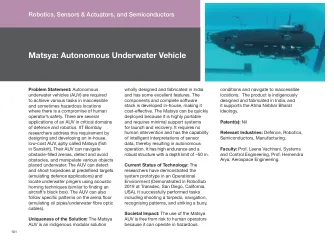
在海上环境中,对各种活动的自主表面船(ASV)的使用和实施预计将推动其控制和控制的增长。尤其是,多个ASV的协调提出了新的挑战和机遇,需要在机器人技术,控制理论,通信系统和海洋科学的交集上进行跨学科的研究工作。可以集体使用这些船只的多种任务或目标,可以应用和组合不同的控制技术。这包括对机器学习的探索,以考虑以前认为不可行的方面。本评论提供了对协调的ASV控制的全面探索,同时解决了先前评论留下的关键差距。与以前的工作不同,我们采用了一种系统的方法来确保完整性并最大程度地减少文章选择中的偏见。我们深入研究了复杂的亚行动ASV世界,重点是定制的控制策略以及机器学习技术的整合以增加自治。通过综合最新进展并确定新兴趋势,我们提供了推动这一领域向前发展的见解,从而为未来的研究工作提供了最新技术的全面概述和指导。
对多个自动表面车辆的协调控制
主要关键词



相关文件推荐