机构名称:
¥ 1.0
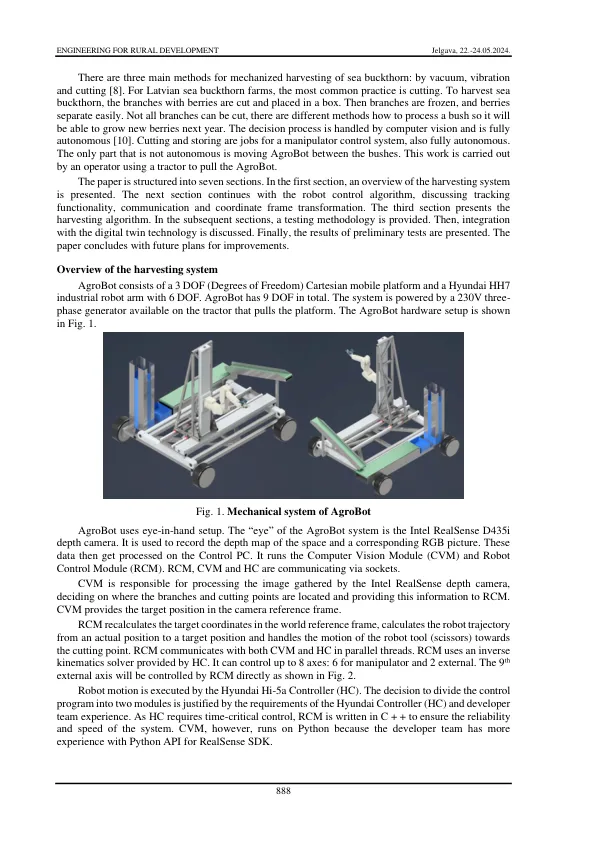
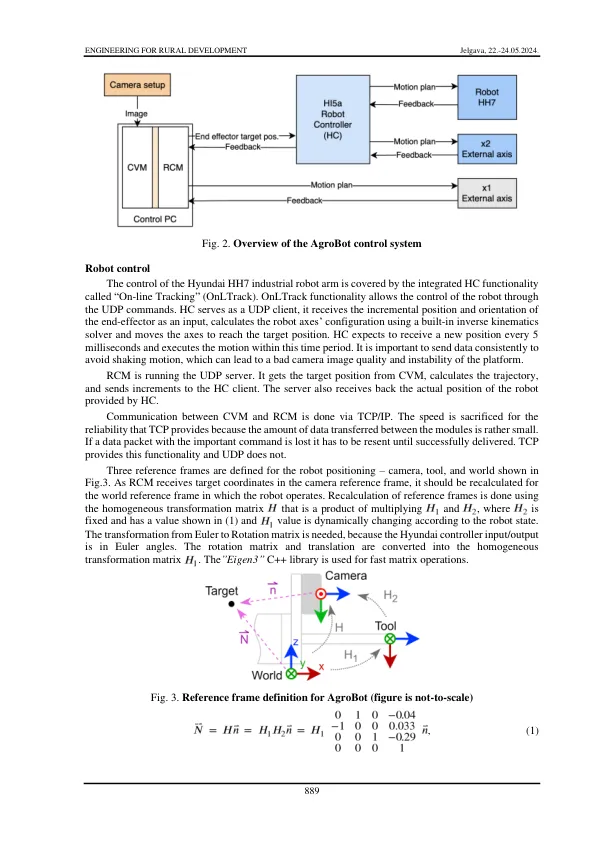
摘要。本文描述了自主农业机器人的控制系统,并使用实验室支架和数字环境评估其运营。Agrobot是一种自主的海卡克索恩浆果收集机器人。它会自动找到灌木分支来收获,切割它们并将其存储在盒子中。Agrobot由一个3 DOF(自由度)的笛卡尔移动平台和一个带有6 DOF的现代HH7工业机器人组成。控制系统是专门设计用于实时操作的,使农民能够适应使目标跟踪复杂化的动态环境条件(风,变化的光)。控制系统由两个单独程序运行的两个模块组成。第一个模块是计算机视觉模块(CVM),该模块具有对农作物操作的高级控制。它使用来自摄像头的进料来查找切割点,并发送命令接近,切割,存储和搜索。该模块用Python编写。第二个模块是机器人控制模块(RCM),该模块从CVM接收高级命令并管理现代控制器(HC)的低级控制。RCM将机器人轨迹计算到目标位置,并在并行线程中与CVM和HC通信,并处理错误。作为HC需要时间关键控制,RCM用C + +写入。RCM和CVM正在通过插座通信的一台计算机运行。 由于移动平台硬件处于开发阶段,并且目前尚不可用,因此创建了机器人的数字双胞胎来测试系统在模拟环境中的性能。RCM和CVM正在通过插座通信的一台计算机运行。由于移动平台硬件处于开发阶段,并且目前尚不可用,因此创建了机器人的数字双胞胎来测试系统在模拟环境中的性能。数字双胞胎的输入与实际机器人相同。使用欧拉角是x,y,z位置和方向a,b,c。数字双胞胎可视化是在Unity游戏引擎中开发的。MATLAB机器人工具箱与Levenberg-Marquardt求解器算法一起使用,以计算9 DOF机器人的反向运动学。本文重点介绍了机器人控制模块体系结构和控制系统的测试。
自动控制系统的开发和测试
主要关键词


相关文件推荐