XiaoMi-AI文件搜索系统
World File Search SystemMec

THZ 004 -V1.1.1GR MEC 041- v3.1.1
证明是创建,传达和评估计算系统的可信度特征的过程。这是在一个依赖方的场景中通过入学和验证者角色来完成的(例如API端点)评估另一个计算实体的可信度(例如API请求者)。验证者可以驻留在(例如)API后端和API请求者的API后端。通常,依赖方向入场者发出挑战请求,以了解API请求者特征的特定范围。完整性测量(例如Digests)(例如固件,内核模块。验证者验证了已收到的证明证据,并将其与先前交付给验证者的已知良好值进行了比较,以对证明系统及其软件堆栈的可信度作出判决。通常,招待会以隐式信任的信任根构建,也就是说,对信任的根源的信任是由其制造商签发的证书或其他认可文档,以描述信任技术的根源。通常,使用耐篡改技术实现信任的根(请参阅[I.37])。一个值得信赖的招待会通常具有受自信的可信度模块,这些模块由信任根或代表信任的模块检查,请参见[i.38]。此外,实施证明角色的实体之间的信任关系,例如ADTSTER,验证者和依赖方通常是使用公共密钥基础架构(PKI)建立的,但也可以使用替代方案,请参见[I.39]。

MEC 800 特殊 gb.fh8
MEC 800 Special 系统由一个柱塞和一个单独的油压马达泵单元组成。专为重型、自动操作重量较大的大型平开门而设计。由于采用油压,柱塞功率完全由安全、防挤压阀装置控制,操作可靠性得到保证。“MEC 800 Special” 提供的优势之一是,当涉及特别大的门时,可以安装第二个柱塞以获得更高的功率额定值,始终保证完全的安全控制。柱塞操作器有两种选择,280 毫米行程,每扇门最大宽度为 3 米;400 毫米行程,适用于宽度超过 3 米的门扇。组成系统的马达泵单元确保了高可靠性标准。该装置配备 0.5 HP 电机,风冷,配备容量大油箱、液压凸轮泵和可调节安全压力阀,以控制系统产生的牵引/推动力。可应要求提供非风冷选项;该型号由挤压铝制成的油箱组成,其中装有凸轮泵、电动机和安全压力阀块。门将装置锁定,以实现最大安全性。此选项建议用于涉及不太重的门且有限的应用
机械工程与技术
机械工程与技术 研究方向:金属成型技术 研究员姓名:CAPILLA GONZÁLEZ,GUSTAVO ORCID:0000-0002-6903-2567 任务:机械工程系,工程部,伊拉普阿托-萨拉曼卡校区 电子邮箱:g.capilla@ugto.mx 学术人员:机电一体化系统设计与集成。最近的研究项目:使用 3D 扫描设计和制作膝关节支撑矫形器的原型,使用增材制造改进膝关节支撑矫形器的设计和制造最近的科学文章:球抛光对 TRIP 钢板表面质量和机械性能的影响。 DOI:10.1007/s00170-021-07715-x 研究方向:具有延迟的系统 研究人员姓名:GOMEZ ALVAREZ、MARCO ANTONIO 任务:机械工程系、工程部、伊拉普阿托-萨拉曼卡校区 电子邮箱:marco.gomez@ugto.mx 学术人员:动力学与机器人学 最近的研究项目:设计和实施用于拾取和放置任务的机械手的基于延迟的控制算法。 最近的科学文章:关于具有多个延迟的微分代数系统的强 H2 范数:有限性标准、正则化和计算。 DOI:10.1109/TAC.2020.3046218 中立型时滞系统的必要充分稳定性条件(通过有限数量的数学运算)。 DOI:10.1109/TAC.2020.3008392

MEC的可重新配置智能计算表面...
摘要 - 在本文中,我们专注于通过使用车辆到基础结构(V2I)链接从蜂窝车辆(CVS)卸载的任务来提高自主驾驶安全性,并将其转移到多访问Edge Computing(MEC)服务器。考虑到可以将用于V2I链路的频率重复用于车辆到车辆(V2V)通信以改善频谱利用率,因此每个V2I链接的接收器可能会严重干扰,从而导致任务卸载过程中的中断。为了解决这个问题,我们建议部署可重新配置的智能构成表面(RIC),不仅可以启用V2I反射性链接,而且还可以在V2V链接处取消利用其超材料的计算能力。我们为CVS和MEC服务器之间的任务卸载比率,V2V和V2I通信之间的频谱共享策略以及RICS反射和折射矩阵设计了联合优化公式,目的是最大程度地利用基于安全的自动驱动任务。由于问题的非跨性别性和自由变量之间的耦合,我们将其转换为更易于处理的等效形式,然后将其分解为三个子问题,并通过替代近似方法求解。我们的仿真结果证明了拟议的RIC优化在提高自动驾驶网络安全性方面的有效性。索引项 - 功能,自动驾驶,多访问边缘计算,频谱共享,任务卸载。
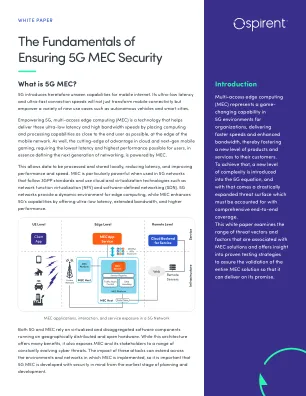
确保5G MEC安全的基本原理
多访问边缘计算(MEC)代表了在5G环境中为组织的游戏功能变化,提供更快的速度和增强的带宽,从而为其客户促进了新的产品和服务水平。为此,将新的复杂性水平引入了5G方程式中,随之而来的是急剧扩展的威胁表面,必须通过全面的端到端覆盖范围来考虑。本白皮书研究了与MEC解决方案相关的威胁向量和因素的范围,并提供了对经过验证的测试策略的见识,以确保对整个MEC解决方案的验证,以便可以实现其诺言。
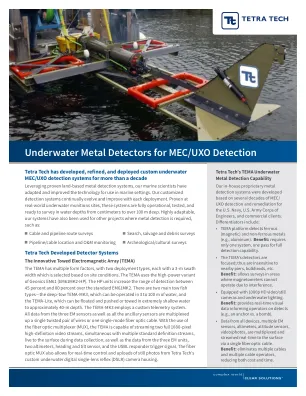
用于 MEC/UXO 检测的水下金属探测器
TEMA 具有多种外形尺寸,有两种部署类型,每种都有 3 米的幅宽,可根据现场条件选择。TEMA 使用 Geonics EM61 (EM61MK2-HP) 的高功率版本。HP 装置比标准 EM61MK2 将检测范围增加了 45% 到 80%。拖鱼主要有两种类型 - 深拖 TEMA-MK3,可在 3 至 100 米深的水中操作,以及 TEMA-Lite,可在极浅的水中漂浮和推动或拖曳,深度约为 40 米。TEMA-MK3 采用定制遥测系统。来自三个 EM 传感器以及所有辅助传感器的所有数据都通过单根双绞线或一根单模光纤电缆进行多路复用。通过使用光纤多路复用器 (MUX),TEMA 能够在数据收集期间将两个全 1080 像素高清视频流与多个标准清晰度流同时实时传输到水面,以及来自三个 EM 单元、两个高度计、航向和倾斜传感器以及 USBL 响应器触发信号的数据。光纤 MUX 还允许实时控制和上传来自 Tetra Tech 定制水下数码单反 (DSLR) 相机外壳的静态照片。