XiaoMi-AI文件搜索系统
World File Search SystemMobile

三星 Mobile Advance 2023
* 或以签订合同时的汇率波动为准的等值英镑 ** 三星不会分享其自身或其他现有合作伙伴的知识产权,也不会保证可以解决选定合作伙伴项目中可能出现的任何技术问题。Samsung Mobile Advance 2023
Jeppesen Mobile 用户指南 1.2
关于 Jeppesen Mobile Jeppesen Mobile 是 Jeppesen 和 Hilton Software(WingX 的开发商)合作协议的成果。Jeppesen Mobile 航空应用套件由飞行员设计,专为飞行员设计,优化了掌上电脑和智能手机的功能。通过将 Hilton Software 的技术优势与 Jeppesen 知名的航空数据库相结合,该应用套件为飞行员提供了强大的飞行前和飞行后功能。Jeppesen Mobile 提供快速访问重量和平衡、路线规划、文本和图形天气、机场/设施目录信息、带有机场图的 JeppGuide 信息、滑行位置信息、动态飞行导航器、文件和表格、E6B 飞行计算器、飞行员货币到期日、日出/日落计算器和飞机注册号搜索的功能。凭借其先进的互联网技术,所有 Jeppesen Mobile 数据库更新和软件升级都可以直接从互联网传输到您的 PDA 或智能手机(无需 PC)。而且,如果您的下载因任何原因中断,我们的下载恢复功能可确保您在需要时获得所需的内容。
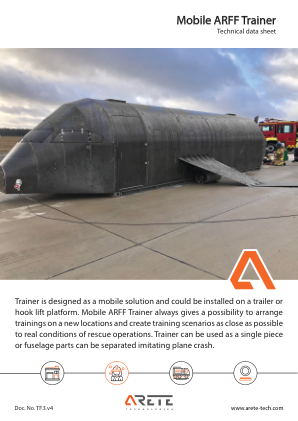
移动式空中救援消防教练机
训练器设计为移动式解决方案,可安装在拖车或吊钩升降平台上。移动式 ARFF 训练器始终可以在新地点安排训练,并创建尽可能接近救援行动真实条件的训练场景。训练器可以作为单件使用,也可以将机身部件分离以模拟飞机坠毁。