XiaoMi-AI文件搜索系统
World File Search SystemNavigate
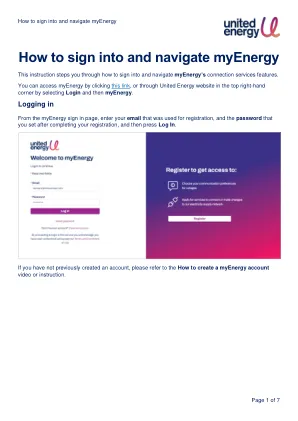
如何登录和浏览 myEnergy
登录完成后,您将被引导至仪表板 - 此屏幕根据注册时选择的用户类型以不同的顺序显示功能。如果您以客户身份注册,您将在顶部看到与客户相关的功能,例如停电通知、能源使用情况和客户解决中心 -

在 Navigate 中创建你的学术计划
您现在位于“我的计划”中。下一步是将计划模板添加到您的计划中。在“计划工具”中,单击“模板”,然后单击“添加模板”链接。中心面板现在显示“添加其他模板”页面。此页面上有一个模板列表。通过选择模板的“添加到我的模板”按钮来选择适合您计划的模板。

利用合作来导航挥发性世界
随着公共部门和私营部门的赌注不断上升,组织需要将重点转向以更精确和远见卓识来管理投资风险。这涉及对假设的仔细重新评估,以确保其准确性,并仔细检查制定过程以衡量长期影响。粒度,阶段栅极过程(或分阶段的审查过程)和适应性正在作为此转变中的关键方法出现。粒度使组织能够将复杂的策略分解为较小,更易于管理的部分,从而更清晰地了解风险和机会。阶段门流程有助于在关键决策点进行定期评估(使决策者能够根据标准评估投资,并决定是否进行,调整或停止),确保灵活性并最大程度地减少对不可预见的风险的影响。的适应性确保公司保持敏捷,并可以根据不断发展的市场状况或破坏而旋转其策略。通过整合这些方法,组织不仅可以更有效地减轻风险,而且可以将自己定位为越来越不确定的世界中的可持续增长。
学习浏览生成式人工智能内容
第 2 段:本研究的目的是调查流感在澳大利亚老年人群中的传播情况。采用回顾性队列设计,使用从 2016 年 1 月至 2018 年 12 月期间被诊断患有流感的 65 岁及以上患者的电子病历中收集的数据。研究人群共包括来自澳大利亚三个州的 12 家医院的 14,527 名患者。收集并使用描述性和推断性统计数据分析了有关人口统计特征、疫苗接种状况、合并症、临床表现和结果的数据。
如何浏览“提前计划”选项卡
A. 计划:一般信息除注册员角色外,所有角色都可以创建计划。计划允许用户预先构建包含多个课程和班级部分的计划。用户只需单击一下即可直接从计划中注册。计划不保证学生将成功注册所选课程和班级。当用户从搜索结果中选择课程时,他们可以将其添加到课程级别的计划中,或查看与课程相关的各个班级并添加 CRN。计划可以混合课程和班级。此时不会进行限制检查。当用户注册课程并从计划中将课程添加到注册摘要时,将进行限制检查。教师和顾问不能将学生创建的任何计划标记为首选。

CUI 登录到警报!导航至 https://alert.csd.disa.mil...
3. 选择家庭或工作、您的国家/地区,然后在相应字段中输入您的实际地址,然后从实际地址的下拉列表中选择。选择后,单击“下一步”添加地址。选择“否”进入下一部分。(如果您的工作地点实际位于军事基地之外,请选择“独立”设施)

采取批判性集体立场,更好地驾驭未来
提起本文:Bozkurt,A.,Xiao,J.,Farrow,R.,Bai,Jyh,Nerantzi,C.,Moore,S. ,D.,Honeychurch,S.,Hodges,M.,Swindell,A.,Frumin,I.,Tlili,A. O.,Huijser,H.,Jandrić,P.,Zheng,C.,Shea,P.,Duart,JM,Themeli,C.,Vorochkov,A.,Sani-Bozkurt,S.生成人工智能时代的教学与学习宣言:更好地驾驭未来的关键集体立场。 Open Praxis,16(4),页487–513。 DOI:https://doi.org/10.55982/openpraxis.16.4.777
决策分析师:通过分析愿景导航未来
该公司成立于1978年,是北美最大的研究和分析公司之一。该公司由其150名员工私有,为全球各地的一系列主要公司,广告机构和政府实体提供服务。公司以满足截止日期,保持预算范围并提供所承诺的一切感到自豪。决策分析师总部位于达拉斯/沃思堡地区。

学习在实际环境中有效,精确地导航
在陆地机器人自主导航的背景下,创建用于代理动力学和感官的现实模型是机器人文献和商业应用中的广泛习惯,在该习惯中,它们用于基于模型的控制和/或用于本地化和映射。另一方面,较新的AI文献是在模拟器或Ai-thor的模拟器或端到端代理上进行训练的,在这种模拟器中,重点放在照相现实渲染和场景多样性上,但是高效率机器人动作具有较少的特权角色。所得的SIM2REAL差距显着影响训练有素的模型转移到真正的机器人平台。在这项工作中,我们探讨了在设置中对代理的端到端培训,从而最大程度地减少了Sim2real Gap,在感应和驱动中。我们的代理直接预测(离散的)速度命令,这些命令是通过真实机器人中的闭环控制维护的。在修改的栖息地模拟器中鉴定并模拟了真实机器人的行为(包括底盘的低级控制器)。探视和定位的噪声模型进一步促进了降低SIM2REAL间隙。我们在实际导航方案上评估,探索不同的本地化和点目标计算方法,并报告与先前的工作相比的性能和鲁棒性的显着增长。

单元格使用分子工作记忆在...
b,EGFR-PTP相互作用网络的方案。配体EGFR(E P)与PTPRG(P RG)和PTPN2(P n 2)相互作用。配体EGFR(E -E P)促进E p的自催化。因果链接 - 纯黑线;弯曲的箭头线 - 扩散,PM-质膜,ER-内质网。另见图1-图1B。C,在细胞极化过程中信号诱导的形状变化。箭头:局部边缘速度方向。Zoom:细胞的粘弹性模型 - 弹性和粘性元件的平行连接。P总计:总压力; V:当地的内存速度; L:粘弹性状态。粗字母:向量。细胞膜轮廓:[0,2π]。d,顶部:空间EGF分布的计算机演变。底部:EP的Kymograph for Handomation在(b)中网络的反应扩散模拟中的临界性。三角形 - 梯度硬化。e,用(c)中的模型获得的颜色编码E P的相应示例性细胞形状。f,顶部:颞pro纤维e p(黑色)和e -e p(灰色)。绿色阴影区域:EGF梯度存在。底部:具有表示捕获状态空间区域(彩色)和相应时间尺度的系统的状态空间轨迹。另请参见图1-视频1。厚/细线:信号前置/缺失。g,在e示例中的硅细胞形态变化中的定量变化。三角形 - 梯度持续时间。h,左:与G中相同,只有从同一方向用两个连续的动态梯度(三角形)刺激时。第二梯度在第一个的内存阶段。另见图1-图1d。右:第二个梯度(橙三角形)的方向相反。另见图1-图补充1E。虚线:g。平均值±S.D.显示了n = 3。参数:方法。在(D-H),绿色(橙)/红线:刺激存在/不存在。