XiaoMi-AI文件搜索系统
World File Search SystemOBO

机器人感知规划:挑战与机遇
机器学习和计算机视觉领域的最新进展显着增强了机器人的感知能力[1],为新的机器人应用开辟了可能性。然而,设计有效整合感知和行动目标的方法仍然是一个不小的挑战。这对协作机器人 [2]、敏捷四旋翼飞行 [3] 和自主安全机器人 [4] 等有前景的机器人应用提出了要求。虽然现有的移动机器人任务(如检查规划[5]和监视[6])通常需要实现地标的可见性,但在理解和如何在解决视野约束时整合额外的自由度(DOF)方面仍然存在差距。近期,使用零空间投影和阻抗控制的机械手分层跟踪方法 [ 7 ] 虽然相关,但尚未完全解决这一挑战。在本文中,我们主张采用新方法,生成用于导航或操纵的机器人运动,同时有效地实现感知目标。现有的方法主要集中于如何在存在看不见的[8]或动态[9]障碍物的情况下规划机器人运动,或者如何改进漫游车的机器人定位[10,11]。此外,考虑兴趣点约束的方法仅仅依赖于将被跟踪特征的质心保持在图像平面的中心[3,12]。最后,大多数现有的方法都是为无人机设计的[3,9-12],不能轻易推广到高自由度机器人,如移动机械手或具有运动约束的机器人。我们认为,需要全面考虑感知和运动目标的方法,才能实现有效的多任务机器人——即同时具有感知和行动目标的机器人。我们通过进行实验来支持我们的机器人,这些机器人必须完成基本任务,例如操纵或导航,同时保持对物体的连续监控。等他环境。到
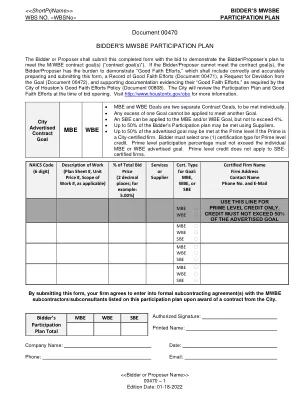
文件 00470:投标人的 MWSBE 参与计划
投标人或提议人应随投标书提交此填妥的表格,以证明投标人/提议人计划实现 M/WBE 合同目标(“合同目标”)。如果投标人/提议人无法实现合同目标,则投标人/提议人有责任证明其“诚意努力”,包括正确准确地准备和提交此表格、诚意努力记录(文件 00471)、偏离目标申请(文件 00472)以及证明其“诚意努力”的支持文件,如休斯顿市诚意努力政策(文件 00808)所要求。市政府将在开标时审查参与计划和诚意努力。请访问 http://www.houstontx.gov/obo 了解更多信息。
来自...网络的科学出版物 - 法国计量学
PERUZZI A.、B OSMA R.、KERKHOF O.、PETER R.、D EL CAMPO M ALDONADO M.D.、S MID M.、Z VIZDIC D.、NIELSEN M.B.、A NAGNOSTOU M.、 G RUDNEWICZ E.、N EDEA M.、S TEUR P.P.M.、F ILIPE E.、LOBO I.、ANTONSEN I.、RENAOT E.、W ECKSTROM T.、B OJKOVSKI J.、TURZO-A NDRAS E.、WHITE M.、T EGELER E.、D OBRE M ., R ANOSTAJ J., KARTAL DOGAN A., A UGEVICIUS V., P OKHUDUN A. 等SIMIC S.,“Euromet.T-K7 最终报告:水三相点电池的关键比较”,Metrologia,46,Tech。增刊,2009,03001,DOI:10.1088/0026-1394/46/1A/03001。

CS59200 -RM:机器人操纵 - 普渡大学计算机科学
the the cabab iliti s o a cab i o o a o o t s t o a cab t o ach t o ach e a a a a a a a a a a a a v e a a a a a a a v e ach i e e e v e c c c t t询问,并提出了这一点,并在他的身份中遇到了a fi e l d s a t a p r e e e p r e e c i p r e ce ce o f b r a d ce o f b r a i i i i mpac t;要付出了代价的范围。它的人类,人类t e l e e n d i n d i s t l oca l oca l oca l oca l oca l oca l oca l oca t l ofe r wa t e r and i n Space和Mo r e e。D esp it e t h i s p r og r ess ( and t he abundance o f coo l demo vi deos ), it' s s till i nc r ed i b ly d iffi cu lt t o make a r obo t do an y one t h i ng , l e t a l one ha v e a gene r a li zab l e s y s t em t ha t can hand l e a s i gn ifi can t b r在各种环境中的任务。那么,让机器人与世界互动有什么困难?T h i s cou r se w ill answe r t ha t ques ti on and p r o vi de an i n - dep t h unde r s t and i ng o f t he s t a t e - o f-t he - a rt i n r obo t man i pu l a ti on b y su rv e yi ng i mpo rt an t l andma r k pape r s i n t he fi e l d as we ll as cu rr en t r ecen tly pub li shed wo r ks。I n pa rti cu l a r, t h i s cou r se w ill ha v e an a l go rit hm i c and compu t a ti ona l f ocus , p r o vi d i ng an unde r s t and i ng o f t he f undamen t a l t echn i ques necessa ry f o r man i pu l a ti on .We w ill a l so co v e r mode r n ad v ances i n how s t a ti s ti ca l mach i ne l ea r n i ng ( pa rti cu l a rly app r oaches known as deep l ea r n i ng , gene r a tiv e A I, o r f ounda ti on mode l s ) a r e app li ed and used b y mode l- and op ti m i za ti on -以我为基础,是现实世界的不确定性。
科学出版物 - 2006 年法国计量活动报告
S TOCK M., SOLVE S., D EL CAMPO D., C HIMENTI V., MÉNDEZ - L ANGO E., L IEDBER H., S TEUR PPM, M ARCARINO P., D EMATTEIS R., FILIPE E., L OBO I., KANG KH, KAM-GER, K. R. Y. R. Y. NIER G., V ALIN M., W HITE R., D RANSFIELD TD, D UAN Y., X IAOKE Y., S TROUSE G., B ALLICO M., S UCKAR D., A RAI M., M ANS A., DEG ROOT M., KERKHOF O., R. R. R., H. R. R., H. R. R. R., H. R. R. R. AND R. Y. ER E., N OATSCH U., D URIS S., K HO HY, U GUR S., P OKHODUN A. and G ERASIMOV SF, “Final report on CCT-K7: Key comparison of water triple point cells”, Metrologia , 43 , Tech.补充03001,2006。

传播科学著作...... - 法国计量学
R Enaot E.,Hermier Y.,V Alin MH,B Onnier G. V.,de G Root M.,N Ielsen J.,H Elgesen F.,R Oszkowski W.,G Rudniewicz E.,K Una R. “ ITS-90从83.80到1967年KMI International S. Ymposium on Its-S. Ymposium of Its-S. Ymposium of Its-S. Ymposium of行业和科学中的实现(Tempmeko- 2007年),加拿大路易丝湖,2007年5月21日至25日,将其对比。
科学著作的传播 已出版的科学著作
RENAOT E.、HERMIER Y.、V ALIN M.H.、B ONNIER G.、A DUNKA F.、V ANDER L INDEN A.、D OBRE M.、S MID M.、B RONNUM A.、W ECKSTROM T.、T EGELER E.、N OATSCH U.、A NAGNOSTOU M.、TURZO -A NDRAS E.、N EMETH S.、WHITE M.、M ARCARINO P.、S TEUR P.、P AUZHA A.、A UGEVICIUS V.、DE G ROOT M.、NIELSEN J.、H ELGESEN F.、R OSZKOWSKI W.、G RUDNIEWICZ E.、K UNA R.、FILIPE E.、LOBO I.、G AITA S.、CHIMENTI V.、I VARSSON J.、DURIS S.、RANOSTAJ J.、B OJKOVSKI J.、S TEINER A.、U GUR S.、G RAY J.、B RUCE S.、R USBY R. 等 H EAD D.,“ITS-90 从 83.8058K 到欧洲 NMI 中的 692.677K”,Int。J.Thermophys。, 29 , 3, 2008, 991-1000,2008 年 4 月上线。

量化腐蚀参数的现场研究...
缩写 ANOVA:方差分析 ASTM:美国材料与试验协会 BOD生物需氧量 BOF:“Bijzonder Onderzoeks Fonds”:弗拉芒政府研究基金 CI:腐蚀指数 COD:化学需氧量 CRS:耐腐蚀钢 DC:直流电 IACS:国际船级社协会 IMO:国际海事组织 KdG:“Karel De Grote”高等教育学院 MARPOL:国际防止船舶污染公约 NKK:日本海事协会 OBO:油类散装矿石 OCAS:位于比利时的钢铁应用研究中心。它是弗拉芒地区和安赛乐米塔尔的合资企业。 PSPC:防护涂层性能标准 TSCF:油轮结构合作论坛 VLCC:超大型原油运输船 简介 大气腐蚀导致金属表面退化是许多暴露在外的钢结构(如桥梁、储罐和管道)的众所周知的问题。将海水引入其中会导致更具侵蚀性的环境,并加剧腐蚀效应。商船航行于世界各地的海洋,在没有货物或船舶仅部分装载时,其压载舱中装有海水,以确保机动性并控制吃水、应力和稳定性。压载舱对于船舶的运行必不可少,但它们易受腐蚀这一事实对船舶来说是一个明显的问题。第一
俄勒冈州数字股权计划草案
1 “数字素养”是指使用技术使用户能够查找、评估、组织、创建和交流信息的相关技能。[...]“数字公平”是指个人和社区拥有充分参与美国社会和经济所需的信息技术能力的状态。“数字包容”是指“确保美国所有个人都能访问和使用负担得起的信息和通信技术所必需的活动,例如可靠的固定和无线宽带互联网服务;满足用户需求的互联网设备;以及旨在实现和鼓励自给自足、参与和协作的应用程序和在线内容;包括获得数字素养培训的机会;提供优质的技术支持;以及获得有关确保网络隐私和网络安全措施的基本意识。”“数字素养”是指“使用技术使用户能够查找、评估、组织、创建和交流信息的相关技能。”基础设施投资和就业法案 § 60302(10)-(12),https://www.congress.gov/117/plaws/publ58/PLAW-117publ58.pdf。OBO 认识到数字素养和数字技能随着技术的发展而发展,包括新兴技术,因此也包括人工智能 (AI) 技术和对 AI 素养的需求。为此,“数字素养 (DL) 涉及自信和批判性地使用各种数字技术来获取信息、沟通和解决生活各个方面的基本问题。它是
俄勒冈州数字股权计划
1 “数字素养”是指使用技术使用户能够查找、评估、组织、创建和交流信息的相关技能。[...]“数字公平”是指个人和社区拥有充分参与美国社会和经济所需的信息技术能力的状态。“数字包容”是指“确保美国所有个人都能访问和使用负担得起的信息和通信技术所必需的活动,例如可靠的固定和无线宽带互联网服务;满足用户需求的互联网设备;以及旨在实现和鼓励自给自足、参与和协作的应用程序和在线内容;包括获得数字素养培训的机会;提供优质的技术支持;以及获得有关确保网络隐私和网络安全措施的基本意识。”“数字素养”是指“使用技术使用户能够查找、评估、组织、创建和交流信息的相关技能。”基础设施投资和就业法案 § 60302(10)-(12),https://www.congress.gov/117/plaws/publ58/PLAW-117publ58.pdf。OBO 认识到数字素养和数字技能随着技术的发展而发展,包括新兴技术,因此也包括人工智能 (AI) 技术和对人工智能素养的需求。另请参阅第 23-26 号行政命令,建立州政府人工智能咨询委员会,https://www.oregon.gov/gov/eo/eo-23-26.pdf。为此,“数字素养 (DL) 涉及