XiaoMi-AI文件搜索系统
World File Search SystemORH

开放机器人硬件:进度,收益,挑战和...
摘要 - 近年来,来自开源项目的技术在机器人技术中广泛采用。机器人技术进步的迅速速度在于开源项目的一部分,为研究人员提供了资源,工具和设备,以迅速实施新颖的思想和方法。开源硬件尤其降低了进入新技术的障碍,并且可以进一步加速机器人技术的创新。但是,开放硬件在开放软件中也更加困难,因为它涉及复制物理组件,这要求用户具有足够的熟悉度和对制造设备的访问权限。在这项工作中,我们首先强调ORH用户和开发人员遇到的关键好处和挑战,然后传达一些可以在开发成功的ORH中采用的最佳实践,从而对开放机器人硬件(ORH)进行了评论。为了实现这一目标,我们调查了机器人技术中不同领域的80个主要项目和计划。最后,我们确定了被调查项目的策略,以进一步详细说明开发过程,并通过ORH项目的设计,文档和传播阶段来指导开发人员。
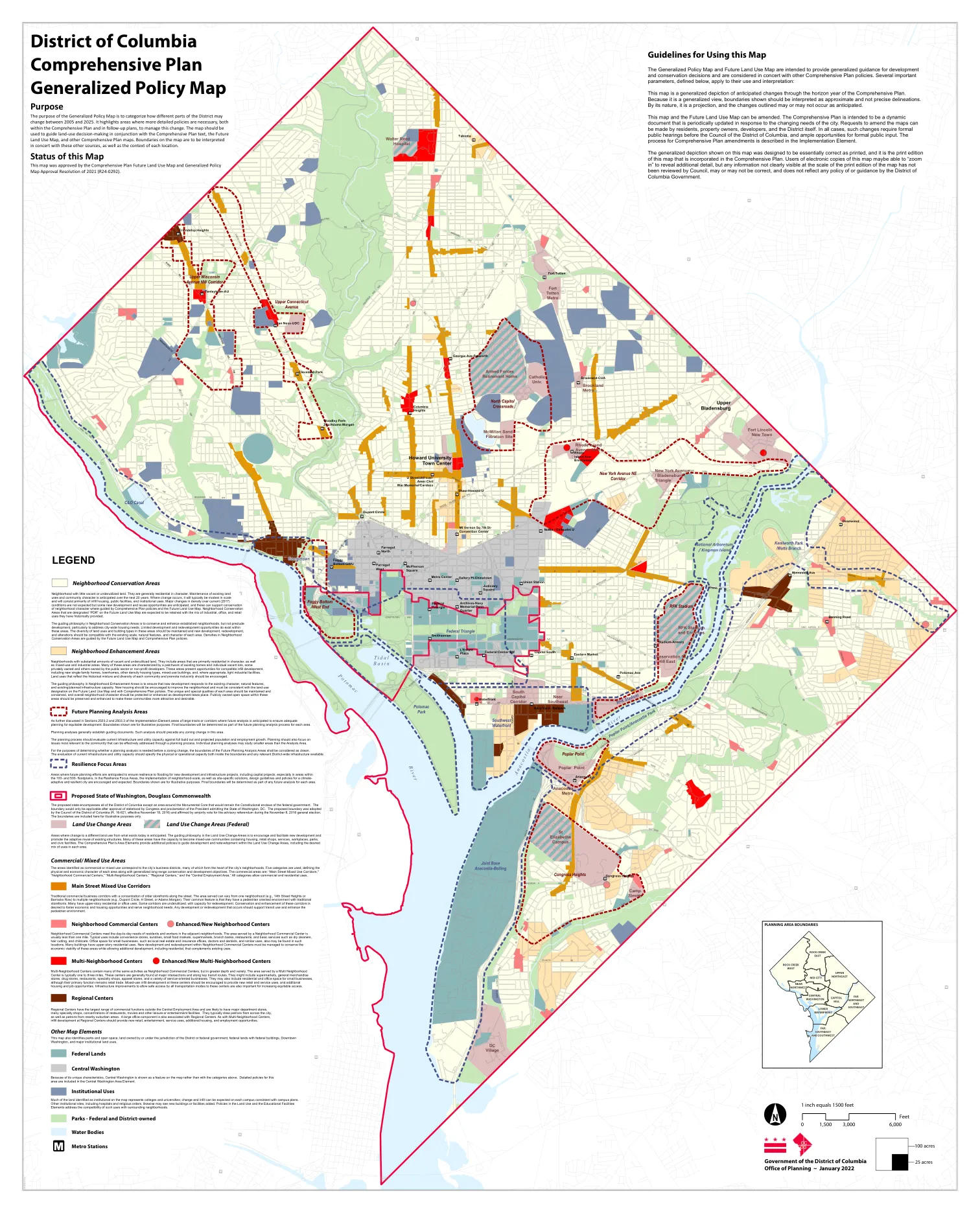
哥伦比亚特区综合计划通用政策地图
社区内几乎没有空置土地或未充分利用的土地。这些土地通常具有住宅性质。预计未来 20 年内将维持现有土地用途和社区特征。如果发生变化,其规模通常较小,主要包括填充式住房、公共设施和机构用途。预计密度不会在当前 (2017) 条件下发生重大变化,但预计将出现一些新的开发和再利用机会,这些机会可以支持在综合计划政策和未来土地利用图的指导下保护邻里社区特色。 预计未来土地利用图上指定为“PDR”的邻里保护区将保留其历史上提供的工业、办公和零售用途组合。
商业计划周期 2023 年 10 月 26 日
3.2 作为确定明年业务计划中要包含的活动的一部分,将考虑已在 GATE 流程中的项目、任何具有多年可交付成果的项目、将纳入转型 (TEG+) 仪表板的计划以及任何之前确定但未确定为本年度优先的活动。 3.3 建议收集业务规划假设的过程与规划过程同时进行(即从 9 月开始),以包括需求预测以及产能和劳动力规划。已成立了一个小组来制定该计划,其中包括规划与发展、服务交付与质量主管 - 运营规划、劳动力规划与信息主管代表,以及 ORH 的支持,以验证规划假设。 3.4 已制定实施业务规划周期的滚动时间表,以确保 2024/25 计划的实施:

比较人类和人工智能医学机器学习中的性能:用于读者研究数据统计分析的开源 Python 库
为了了解人工智能 (AI) 对诊断医学实践的潜在影响,许多调查涉及收集多位人类专家对一组常见病例的解释。为了标准化分析此类研究数据的过程,我们发布了一个开源 Python 库来执行适用的统计程序。该软件实现了行业标准的 Obuchowski-Rockette-Hillis (ORH) 方法,用于多读者多病例 (MRMC) 研究。这些工具可用于将独立算法与读者小组进行比较,或比较以两种模式操作的读者(例如,有和没有算法辅助)。该软件支持非等效性和非劣效性检验。还提供了模拟读者和模型分数的函数,可用于蒙特卡洛功效分析。该代码在我们的 Gitub 存储库中公开提供,网址为 https://github.com/Google-Health/google-health/tree/master/analysis 。

具有不确定动力学的系统的规定性能和边界层控制
控制技术或控制理论是一个落下数学,物理和电气技术的两个水平研究领域。基本上是关于形成算法和方程的依赖于应将控制信号发送到动态系统以实现'scond行为的方程式。普通的歧义包括稳定机器人手臂,维持“损坏的室温或为车辆为特定路线上油。控制技术是关于决定转向警卫制作给定油或参考信号的。控制技术与未指定的研究领域之间的差异在于智能的工作:控制技术旨在为系统创建准确,裸露的控制策略,而使用和使用理解和使用情报。不需要完整模型的情况。经典的重新塑造方法不必作为一个很好的工作,而是迫使基本的数学模型的喜悦。控制系统不需要通过截断阶段进行操作,因为它们基于系统的动力学和行为。但是,现代适应性的调节器可以使用基于物理和数学的模型,该模型与截断数据相关的参数以脱离了类似BOUT的控制信号。控制技术中的当前研究领域 - SNA的控制,称为Okanda Systems,具有引人注目的普遍要求。漏斗功能)。规范系统一个固定系统的一个例子是辅助控制,与在回顾性的环境环境国家一起运行的情况下,周围环境及其周围环境都需要与周围的环境联系起来。迅速变化的牛皮和水 - 静止的土地,它与数学建模相比,因为对照技术仪经常受到影响,而且很难以良好的课程形式遵守知识的权利。最新的热情采用了一种现代控制方法,称为处方绩效控制(也称为漏斗控制),可以轻松地在这种问题上航行。从理论上讲,该方法可以保证系统不会偏离其组装课程 - 即使在重新元素中使用有关系统的动态或证据的信息,您对手的操作也不会。通过定义称为漏斗功能的疮来指定最大偏差的要求(Eng。通过高级数学方法,控制算法扩展了最佳,并且(如有必要)向系统扩展了大量的猪,以强迫其偏离其小于擦除水平的“漏斗”。漏斗法规中的一个问题是,不可能保证在不同时使用学习零时间的函数的情况下,银行业期间的偏差变得很小。然后通过在用于减少控制信号的方程式中留下不连续的功能来解决此问题。从理论上讲,这不是更大的问题,但是实际上,它导致秃头问题(零售额为零),而不幸的是在预示系统中的实际组件上挂在楼上。如果函数中存在困境或扩散,则通常将功能视为不连续的。该术语的目的是确保系统始终朝着该位置的时间直接转向。