XiaoMi-AI文件搜索系统
World File Search SystemPPK
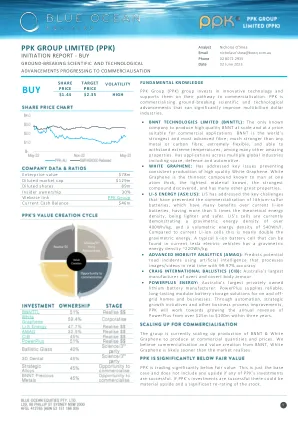
PPK Group Limited(PPK)
阻止了锂硫电池的商业化,这些电池比当前的锂离子电池有很多好处,其比理论能量密度的5倍以上,更轻,更安全。lis的细胞目前显示出超过400WH/kg的重量能密度,并且容积能量密度为540WH/L。与当前的锂离子细胞相比,这几乎是重量级能量的两倍。在当前特斯拉电动汽车中可以找到的典型锂离子电池具有重量的能量密度〜220WH/kg。•高级移动性分析(AMAG):预测潜在


引用li g,sun y and zhu l(2024),机器学习的应用与种群药代动力学相结合以改善V
反应(Ye等,2016)。然而,万古霉素药代动力学参数的选择仍然存在争议,包括槽浓度,清除等(Ghasemiyeh等人,2023年)。种群药代动力学(PPK),将经典的药代动力学建模与种群统计建模相结合。万古霉素一直是成年人中许多PPK研究的主题(Aljutayli等,2020; Lindley等,2023)。已经表明,可以在中国成年患者中对万古霉素的种群药代动力学建模(He等,2014; Gao等,2018)。PPK研究万古霉素对于指导临床剂量很重要。但是,PPK模型可能不足以预测单个药代动力学参数。机器学习(ML)是一种数据驱动的方法,它使用培训数据来学习如何通过各种算法完成任务,然后就特定事件做出决策和预测。在药代动力学中,机器学习允许进行分析和预测(Ota和Yamashita,2022; Wang等,2023)。机器学习和人口药代动力学的结合是药物研发的新工具(Zhu等,2022; Damnjanovic等,2023)。据报道,机器学习与PPK方法相结合可以改善对新生儿六种药物的单个清除率的预测(Tang等,2021)。但是,在成年患者中很少有类似的研究。如今,在机器学习的领域,生产了许多模型。 额外的树回归模型(Geurts等,2006),是一种综合学习如今,在机器学习的领域,生产了许多模型。额外的树回归模型(Geurts等,2006),是一种综合学习决策树回归模型(Kaminski等,2018)是一种回归算法,它使用决策树作为基本模型,该算法通过将输入变量划分为多个特征并根据这些功能构建决策树来拟合数据。梯度提升决策树(Si等,2017)是一种基于集成学习的算法,它通过将多个决策树模型集成在一起来拟合数据。极端梯度提升(Chen and Guestrin,2016)是一种有效的梯度增强算法,它通过使用贪婪算法来选择用于拆卸的最佳功能来最大程度地减少损失函数。

多磷酸激酶缺失可提高蓝细菌的实验室生产率
识别和对细胞能量调节机制的操纵可能是提高光合生物生产率的策略。这项工作检验了以下假设:通过以ATP形式将能量储存或消散能量在能量管理中起作用。在蓝细菌合成细胞群Sp中产生了无法合成多磷酸盐的多磷酸激酶(PPK)敲除菌株。PCC 6803。在高碳条件下,这种突变菌株比野生型菌株表现出更高的ATP水平和更快的生长,并且在多种应力条件下具有生长缺陷。在将PPK缺失与乙烯形成酶异源表达结合的菌株中,观察到比野生型背景相比,观察到较高的乙烯生产率。这些结果支持多磷酸合成和降解作为能量调节机制的作用,并表明这种机制可能是生物培养设计中的有效靶标。

380015 Navic-Gagan的机会宣布...
Carrier-phase based Precise GNSS Positioning applications, Differential Positioning, RTK, PPP & PPK, CORS, Network RTK, PPP-RTK, Geodesy and Surveying, Precise Timing & Synchronization Applications, auto docking, Attitude control & determination, Mapping & Geo informatics using GNSS & NavIC, Algorithms based on AI/ML/DL

白皮书 - Trimble UX5 HP
机翼,在所有操作环境中提供出色的 SNR,同时允许机翼上方的气流不受干扰。在有效载荷舱中,包含 GNSS 接收器板的 gBox 紧紧绑在周围的保护泡沫中(图 2,A)。接收器以 20 Hz 的频率记录 GNSS 数据以对轨迹进行后处理,并在 GNSS 日志中以优于毫秒级的精度标记来自相机的反馈事件。与实时动态 (RTK) 校正系统相比,UX5 HP 使用后处理动态 (PPK) 校正轨迹和事件标记位置。这种选择是专门考虑到 UX5 HP 平台的高速和长距离特性而做出的,在整个飞行过程中不依赖无线电链路来获得准确的解决方案使系统更加可靠。作为额外的好处,PPK 计算的解决方案可以通过利用更精确的轨道数据和更复杂的平滑、过滤和插值算法比 RTK 更准确。此外,您可以减少在现场花费的时间,因为设置仅用于记录的基站不太复杂,并且当使用互联网基础数据源时,基站甚至不是必需的。在办公室花费的时间与仅 RTK 系统相同,因为对于基于 RTK 的 UAS,通常还需要进行后处理才能获得基站的精确位置。
利用基于节能的需求侧管理优化采用不同电池技术的离网综合可再生能源系统
1 电气与电子工程系,GMR 技术学院,Rajam 532127,印度;praveenkumar.p@gmrit.edu.in(PPK);nramkrishna231@gmail.com(RSSN) 2 电气工程与工业自动化学院,工程技术学院,墨尔本校区,墨尔本,VIC 3001,澳大利亚;shezan.ict@gmail.com 或 shezan.arafin@eit.edu.au 3 电气与电子系,NMAM 技术学院,Nitte,Karkala 574110,印度 4 电气与电子工程系,Nisantasi 大学工程与建筑学院,伊斯坦布尔 34100,土耳其;ilhcol@gmail.com 5 电气工程系,卡塔尔大学,多哈 2713,卡塔尔; sm.muyeen@qu.edu.qa 6 默多克大学工程与能源学院,西澳大利亚州默多克 6150,澳大利亚;gm.shafiullah@murdoch.edu.au 7 帕布纳科技大学电气与电子工程系,孟加拉国帕布纳 6600;fatineeeruet@gmail.com 8 格里夫斯大学昆士兰微纳米技术中心,昆士兰州内森 4113,澳大利亚;mdalamgir.hossain@griffith.edu.au 9 沙特国王大学工程学院电气工程系,沙特阿拉伯利雅得 11421;faalsaif@ksu.edu.sa 10 Nestlives Private Limited 研究与开发部(电力与能源),印度钦奈 600091; rajvikram@nestlives.com * 通讯地址:akhlaqur.rahman@eit.edu.au

无人机保护事业
AGL 高于地面 AOI 感兴趣区域 ARF 即将起飞 ATC 空中交通管制 BEC 电池消除电路 B-VLOS 超视距 CAA 民航局 CHDK Canon Hack 开发套件 CMOS 互补金属氧化物半导体 CW 顺时针 CCW 逆时针 DSM 数字表面模型 DJI 大疆创新 ESC 电子速度控制器 FL 飞行高度 FLIR 前视红外雷达 FPV 第一人称视角 GIS 地理信息系统 GPS 全球定位系统 GNSS 全球导航卫星系统 IATA 国际航空运输协会 ICAO 国际民用航空组织 KAP 风筝航空摄影 LiDAR 光检测和测距 LiPo 锂聚合物 LRS 远程系统 MP 百万像素 NATS 国家空中交通服务 NDVI 归一化差异植被指数 NGO 非政府组织 NOTAM 飞行员通知 OPTO 光隔离器 OSD 屏幕显示 PfAW 空中作业许可 PNP 即插即用 PPK后处理运动学 RC 无线电控制 RGB 红色、绿色、蓝色 RPAS 遥控飞机系统 RTF 准备飞行 RTH 返回家园 RTK 实时运动学 RTL 返回发射 SfM-MVS 运动结构多视角立体 TLS 地面激光扫描仪 TOW 起飞重量 UAV 无人驾驶飞行器 UTM 无人驾驶飞机系统交通管理 VFR 目视飞行规则 VLOS 视觉视线
Microsoft Word - Study_Image_Types_May21_2019_open.docx
AW3D ALOS 世界 3D(近全球高度模型) AW3D30 点间距为 30 米的 AW3D(免费提供高度模型) CAP 共同农业政策(欧盟政策) CCD 电荷耦合器件 CMOS 互补金属氧化物半导体 CORINE 环境信息协调 CORS 连续运行参考站(用于精确 GNSS 定位) DInSAR 差分干涉合成孔径雷达 DSM 数字表面模型(可见表面高度) DTM 数字地形模型(裸地高度) EASA 欧洲航空安全局 EGNOS 欧洲地球静止导航叠加服务 FMC 前向运动补偿 FOV 视场 GCP 地面控制点 GDEM2 ASTER 全球数字高程模型(免费提供 DSM) GNSS 全球导航卫星系统(GPS、GLONASS、伽利略、北斗等) GSD 地面采样距离 HALE 高空长航时 ICAO 国际民用航空组织 InSAR 干涉合成孔径雷达 JRC 欧盟委员会联合研究中心 LiDAR 光探测与测距 - 也称为激光扫描仪 LOD 细节层次(用于城市地图细节) LPIS 地块信息系统 MEMS 微机电系统 - 用于姿态测定 Mpix 百万像素(传感器像素数) NDVI 归一化差异植被指数 NIR 近红外 OCS GE 大规模土地覆盖和土地利用数据库(大尺度太阳辐射职业) PPK 后处理 运动 GNSS