XiaoMi-AI文件搜索系统
World File Search SystemPROP
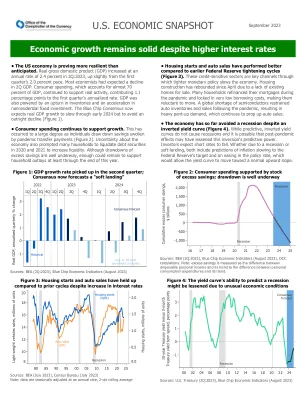
美国经济概况
• 房屋开工和汽车销售表现较好(图3)。这些信贷敏感型行业是货币紧缩政策拖累经济的关键渠道。由于现房供应不足,住房建设自4月以来出现反弹。许多家庭在疫情期间重新融资抵押贷款,并锁定了非常低的借贷成本,使他们不愿意搬家。全球半导体短缺抑制了疫情后的汽车库存和销售,导致大量被压抑的需求,这继续支撑了汽车销售。与美联储早期的紧缩周期相比,房屋开工和汽车销售表现较好(图3)。这些信贷敏感型行业是货币紧缩政策拖累经济的关键渠道。由于现房供应不足,住房建设自4月以来出现反弹。许多家庭在疫情期间重新融资抵押贷款,并锁定了非常低的借贷成本,使他们不愿意搬家。疫情过后,全球半导体短缺抑制了汽车库存和销售,导致大量被压抑的需求,从而继续支撑汽车销售。
上诉人,诉BER-第九巡回上诉法院
1地方法院得出的结论是,个人被告无权获得普通法主权豁免权,而是由于缺乏个人管辖权而驳回了针对个人被告的索赔。我们确认,基于普通法主权豁免的驳回,我们对地方法院的个人管辖权分析没有任何看法。请参阅Cigna Prop。&cas。ins。Co.诉Polaris Pictures Corp.,159 F.3d 412,418(9th Cir。1998)(“在审查地方法院的裁决时,我们可以在记录中的任何基础发现支持下确认。 如果以下决定是正确的,则必须确认,即使地方法院依靠错误的理由或错误的理由依靠。”)(省略了内部引文和引文)。1998)(“在审查地方法院的裁决时,我们可以在记录中的任何基础发现支持下确认。如果以下决定是正确的,则必须确认,即使地方法院依靠错误的理由或错误的理由依靠。”)(省略了内部引文和引文)。

用于增强折射率传感的氮化硅脊波导模式特性研究
摘要:本文结合数值分析和实验验证,研究了基于氮化硅 (Si3N4) 平台的脊形波导的波长相关灵敏度。在第一部分中,详细分析了 Si3N4 脊形波导的模式特性,重点分析了有效折射率 (neff)、衰减场比 (EFR) 和传播损耗 (αprop)。这些参数对于理解引导光与周围介质的相互作用以及优化用于传感应用的波导设计至关重要。在第二部分中,通过实验证明了基于 Si3N4 波导的赛道环谐振器 (RTRR) 的波长相关灵敏度。结果表明,随着波长从 1520 nm 移至 1600 nm,RTRR 的灵敏度明显提高,从 116.3 nm/RIU 上升到 143.3 nm/RIU。这一趋势为设备在较长波长下的增强性能提供了宝贵的见解,强调了其在需要在该光谱范围内高灵敏度的应用方面的潜力。

ECSA Fueleu海事ECSA Fueleu海事
p风 - 风辅助推进系统的有效功率 - 2021年治疗创新能源效率技术的指南,用于计算和验证已达到的能源效率设计指数(EEDI)和能源效率现有的现有船舶指数(EEXI)(EEXI)(MEPC.1/Circe.896); P Prop-船的推进能力与PME相对应,如2018年的PME对应于2018年有关新船的EEDI计算方法(IMO分辨率MEPC.364(79))和2021指南的PME,以及有关计算方法的2021指南(IMO分辨率MEPC.333(76)(76))。

2019 年 5 月至 6 月 - crac.co.nz
它们是最早配备武器的飞机之一,最初在机身上安装了一两支步枪,倾斜以避开螺旋桨弧。后来这些被机枪取代,但在引入通过螺旋桨弧射击的同步机枪之前,Scout 基本上已从前线服务中淘汰。一些机枪安装在螺旋桨上方(如两架 Nieuport 17),其他机枪安装在螺旋桨弧上方,无需同步装置即可通过螺旋桨弧射击!

通过基于模型的四旋翼无人机系统识别...
K t = 电机扭矩系数,单位为 N m/amp K e = 电机反电动势系数,单位为 V/(rad/s) V batt = 电池电压,伏特 R tt = 电机电阻(端子到端子),欧姆 J m = 电机和螺旋桨惯性,单位为 kg m2 D r = 转子(螺旋桨)直径,单位为 m ρ = 空气密度,单位为 kg/m3 T = 螺旋桨推力,NQ = 螺旋桨扭矩,单位为 N m CT = 螺旋桨推力常数 CP = 螺旋桨功率常数 Ixx 、I yy 、Izz = 无人机惯性矩,单位为 kg m2 m = 无人机质量,单位为 kg L x 、L y = 从 CG 到电机的力矩臂,单位为 m ω x 、ω y 、ω z = 机身轴旋转速度,单位为 rad/s ψ、θ、φ = 惯性轴到机身的欧拉角,单位为 rad ux 、uy 、uz =感知位置处的体轴速度 ux cg , uy cg , uz cg = 重心处的体轴速度 ω m = 电机速度,rad/s T d = 硬件更新延迟,惯性测量单元 (IMU) T d 2 = 硬件更新延迟,OptiTrack 反馈 CG = 重心 z cg = OptiTrack 传感器测量点下方的垂直重心距离 G 输出输入 = 从输入到输出的传递函数
通过基于模型的四旋翼无人机系统识别...
K t = 电机扭矩系数,N m/amp K e = 电机反电动势系数,V/(rad/s) V batt = 电池电压,伏特 R tt = 电机电阻(端子到端子),欧姆 J m = 电机和螺旋桨惯性,kg m2 D r = 转子(螺旋桨)直径,米 ρ = 空气密度,kg/m3 T = 螺旋桨推力,N Q = 螺旋桨扭矩,N m C T = 螺旋桨推力常数 C P = 螺旋桨功率常数 Ixx ,I yy ,Izz = 无人机惯性矩,kg m2 m = 无人机质量,kg L x ,L y = 从 CG 到电机的力臂,米 ω x ,ω y ,ω z = 机身轴旋转速度,弧度/秒 ψ,θ,φ = 惯性轴到机身的欧拉角,弧度 u x ,u y , u z = 感测位置处的身体轴速度 u x cg , u y cg , u z cg = 重心处的身体轴速度 ω m = 电机速度,rad/s T d = 硬件更新延迟,惯性测量单元 (IMU) T d 2 = 硬件更新延迟,OptiTrack 反馈 CG = 重心 z cg = OptiTrack 传感器测量点下方的垂直重心距离 G 输出输入 = 从输入到输出的传递函数

神经电子:人造,大脑和
摘要全球计算机系统的新时代已经是现实。神经电子的互联网,结合人造神经元与人类神经元一起工作,人类神经元,人与机器之间的融合,将互联网作为平台。这项工作提出了更多关于已经成为现实的创新概念的更多信息,这首先是共同集成并出于相同目的而起作用的三种重要的新兴技术:脑部计算界面,人工神经网络和先进的记忆技术,也称为记忆。关键字:神经电子学,人工神经元,高级抽象记忆技术全球计算机系统的新时代已经成为现实。神经电子学的互联网,人造人造结合了神经元与人类神经元,融合式男人和机器一起工作,具有互联网是平台。这项作品提出了更多旨在澄清已经成为现实的创新概念,这首先是整合了三种重要的新兴技术并出于相同的目的而起作用:脑部计算机界面,人工神经网络和先进的技术,也称为Memistors。关键字:神经电子学,人工神经元,高级记忆技术。
打开人工智能预测的黑匣子......
人类的决策。本论文依靠可解释的人工智能,通过使用几种最先进的不可知方法的改良,使心跳分类变得易于理解。为了解释时间序列分类器,提出了一种初步的分类法,并使用导数作为