XiaoMi-AI文件搜索系统
World File Search SystemPose
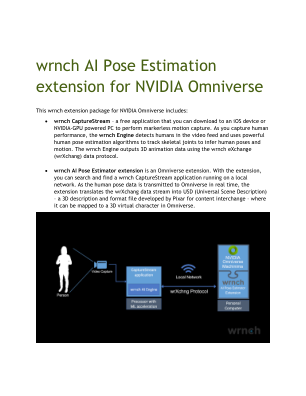
wrnch NVIDIA Omniverse 的 AI 姿势估计扩展
• wrnch CaptureStream – 一款免费应用程序,您可以将其下载到 iOS 设备或搭载 NVIDIA-GPU 的 PC 上,以执行无标记动作捕捉。在您捕捉人体动作时,wrnch 引擎会检测视频源中的人体,并使用强大的人体姿势估计算法来跟踪骨骼关节,以推断人体姿势和动作。wrnch 引擎使用 wrnch eXchange (wrXchang) 数据协议输出 3D 动画数据。• wrnch AI Pose Estimator 扩展是一款 Omniverse 扩展。使用此扩展,您可以搜索并查找在本地网络上运行的 wrnch CaptureStream 应用程序。当人体姿势数据实时传输到 Omniverse 时,该扩展会将 wrXchang 数据流转换为 USD(通用场景描述)——皮克斯为内容交换而开发的 3D 描述和格式文件,可将其映射到 Omniverse 中的 3D 虚拟角色。

基于深度学习的产科超声平面姿态回归
摘要 目的在产科超声 (US) 扫描中,学习者根据二维 (2D) US 图像在脑海中构建胎儿的三维 (3D) 地图的能力代表了技能习得中的重大挑战。我们的目标是构建一个 US 平面定位系统,用于 3D 可视化、训练和引导,而无需集成额外的传感器。方法我们提出了一个回归卷积神经网络 (CNN),使用图像特征来估计任意方向的 US 平面相对于胎儿大脑中心的六维姿势。该网络在从幻影 3D US 体积获取的合成图像上进行训练,并在真实扫描上进行微调。训练数据是通过将 US 体积在 Unity 中以随机坐标切成成像平面并在标准经脑室 (TV) 平面周围更密集地切片来生成的。结果使用幻影数据,随机平面和靠近 TV 平面的平面的中位误差分别为 0.90 mm/1.17 ◦ 和 0.44 mm/1.21 ◦。对于真实数据,使用具有相同胎龄 (GA) 的不同胎儿,这些误差为 11.84 mm/25.17 ◦。平均推理时间为每平面 2.97 毫秒。结论所提出的网络可靠地定位了幻影数据中胎儿大脑内的超声平面,并成功地从与训练中类似的 GA 中推广了看不见的胎儿大脑的姿势回归。未来的发展将扩大预测范围,以预测整个胎儿的体积,并评估其在获取标准胎儿平面时基于视觉的徒手超声辅助导航的潜力。
繁重的指数浓度带来新的风险和机会
在整个历史上,由经过浮动的市值加权的标准普尔500指数旋转了其领先的领域。到1990年底,能源占标准普尔500指数的13.4%,几乎是技术的两倍。但是,到1996年,技术已经超过能源,并继续增长,直到2000年8月达到33.6%。然后,随着技术泡沫破裂,到2001年9月,技术部门在指数中损失了一半以上的重量。虽然技术在2002年后反弹,但在接下来的几年中,它的稳定相对稳定,而能源会因地缘政治紧张局势带来的全球石油短缺和一系列破坏供应的自然灾害而经历了令人难以置信的增长。这些事件在2008年6月之前再次触及了这两个部门,每个部门的重量约为16.5%。在全球财务危机之后,由于压裂和在争夺市场份额之战中供应多个供应的多个实例所引起的能源减少了,而技术将其指数重量增加了一倍,最近在2020年9月,由于使用智能手机,平板电脑,社交媒体,消息传递,流媒体,流媒体等的需求增长,因此在2020年9月的需求增加了28%。的机会是技术部门不会永远占主导地位,但是与此同时,在这场大流行危机期间,出现了一种新的且潜在的索引特征。此外,标准普尔500指数中的最高股票现在比以往任何时候都更重,占20%以上。

具有仅姿势监督的显着稀疏视觉探子仪
摘要 - 视觉探测器(VO)对于自主系统的导航至关重要,以合理的成本提供准确的位置和方向估计。虽然传统的VO方法在某些条件下脱颖而出,但它们会面临诸如可变照明和运动模糊之类的挑战。深度学习的VO虽然更适应性,但在新环境中可能会面临概括问题。解决这些缺点时,本文提出了一种新型的混合视觉探光(VO)框架,该框架利用了姿势的超级视觉,提供了稳健性和对广泛标签的需求之间的平衡解决方案。我们提出了两种具有成本效益和创新的设计:一种自我监管的同谱预训练,用于从唯一的姿势标签中增强光流学习,以及一个随机的基于贴片的显着点检测策略,以进行更准确的光流贴片提取。这些设计消除了对训练的密集光流标签的需求,并显着提高了系统在多样化和挑战性环境中的概括能力。与密集的光学流程监督最终的最新方法相比,在极端和看不见的情况下,在极端和看不见的情况下,在标准数据集以及更大的鲁棒性和概括能力上实现了竞争性能。

1我们考虑一个带有V变量的系统,该系统构成...
图。4。检查分类特征。我们发现分类数量是某个⃗X∗的斜率,即| J IJ | ,尤其是在低n中,表现出色的功能。此外,我们还记录了网络中的所有其他变量,以评估部分相关性。

7。姿势估计的机器学习和计算机视觉
•熟悉计算机视觉-DeepLabcut [1]工具箱。•具有软件中的培训和测试CNN和DNN算法的专业知识,并了解在硬件上部署算法(在FPGA上)。•具有Python的培训,以及对基本信号处理概念的了解•具有Verilog和PCB设计的经验是首选•候选人必须具有自我驱动的态度,调试和解决问题的能力以及独立工作的能力。联系人:请与Mustafa Kanchwala(Mustafaa.kanchwala@mail.utoronto.ca)联系,然后复制到Roman Genov教授(roman@eecg.utoronto.ca)。请随附您的求职信,简历和成绩单(没办法可以)[1] https://www.mackenziemathislab.org/deeplabcut-动物姿势估计的软件包

动态吸引的热图回归视频中的人姿势估计
我们提出了一种解决视频中2D人姿势估计的方法。视频中人类姿势估计的问题与估计静态图像中的人类姿势不同,因为视频包含大量相关信息。因此,我们投资了如何通过一系列视频框架来利用人体运动的信息来估算视频中的人类姿势。为此,我们引入了一种新型的热图回归方法,我们称之为运动吸引的热图恢复。我们的方法计算相邻帧的关节关键点中的运动向量。然后,我们签署了一种新的热图样式,我们称之为运动意识到的热图,以反映每个关节点的运动不确定性。与传统的热图不同,我们的运动吸引热图不仅考虑了当前的关节位置,而且还考虑了关节如何随时间移动。此外,我们引入了一个模拟且有效的框架,旨在将运动信息置于热图回归中。我们评估了在Posetrack(2018,21)和Sub-JHMDB数据集上的运动感知热图回归。我们的结果证明,拟议的运动吸引热图可显着提高视频中Human姿势估计的精度,尤其是在Challenging方案中,例如像体育游戏镜头一样具有实质性人类动作的视频。(代码和相关材料可在https://github.com/ songinpyo/mtpose中获得。)

单眼6D对象的挑战机器人
摘要 - 对象姿势估计是一项核心感知任务,可以使对象操纵和场景理解。允许快速推理的广泛可用,廉价和高分辨率的RGB传感器和CNN使单眼方法特别适合机器人应用。我们观察到,以前的调查是针对不同方式,单视图设置以及考虑多种应用程序的数据集和指标的建立最新技术的调查。但是,我们认为这些作品的广泛范围阻碍了对单眼方法的开放挑战的识别,并妨碍了对其在机器人技术中应用的有希望的未来挑战的推论。通过对机器人技术和计算机愿景的最新出版物提供统一的看法,我们发现遮挡处理,姿势表示以及正式化和改善类别级别的姿势估计仍然是与机器人技术高度相关的基本挑战。此外,为了进一步改善机器人性能,大物体集,新颖的对象,分裂材料和不确定性估计是中心的,在很大程度上尚未解决开放挑战。为了解决这些问题,需要改进算法的本体论推理,可变形性处理,场景级别的推理,现实数据集以及算法的生态足迹。

egecentric 3D手姿势估计的单一对偶视图改编
对准确的3D手姿势估计的追求是理解以自我为中心视力领域的人类活动的基石。大多数现有估计方法仍然依赖单视图像作为输入,从而导致潜在的局限性,例如,深度有限的视野和义务。解决这些问题,添加另一个相机以更好地捕获手的形状是实践方向。然而,现有的多视图手姿势姿势方法具有两个主要缺点:1)重新训练的多视图注释,这些注释是备用的。2)在测试过程中,如果相机参数/布局与训练中使用的相同,则模型将变为inpapplicable。在本文中,我们提出了一种新颖的单算观看改编(S2DHAND)解决方案,该解决方案将预先训练的单视估计器适应双视图。与现有的多视图训练方法相比,1)我们的适应过程是无监督的,消除了对多视图注释的需求。2)此外,我们的方法可以处理带有未知相机参数的Arbitarary双视图对,从而使该模型适用于不同的相机设置。具体来说,S2DHAND建立在某些立体声约束上,包括两种视图之间的成对跨视图共识和转换的不变性。这两个立体声约束以互补的方式使用来进行伪标记,从而允许可靠的适应性。评估结果表明,在内部和跨数据库设置下,S2DHAND在任意摄像机对上实现了重大的实现,并且胜过具有领先性能的现有适应方法。项目页面:https://github.com/ut-vision/s2dhand。

可能对人类构成威胁的人工智能未来趋势
这项技术的应用是无穷无尽的。每过一天,人们就会发现这项技术的应用或嵌入到新的领域。这项技术在日常生活中被广泛使用,以至于大多数时候它的可用性都不为人知。它无处不在,每天都在新设备、新技术、新方法等中被提及。这项技术改变了任何正在引入的行业。它使实施它的系统的许多部分升级。它被公认为最伟大的工具之一,可以大大降低成本和所需的力量,从而自动化系统的任何部分。这种利用人工智能的新方法可以在以下伟大的申请者名单中找到:医疗保健、商业、教育、娱乐和法律。这并不是其应用的完整列表,而是显示了这项技术的重要性和戏剧性。