XiaoMi-AI文件搜索系统
World File Search SystemRAIM
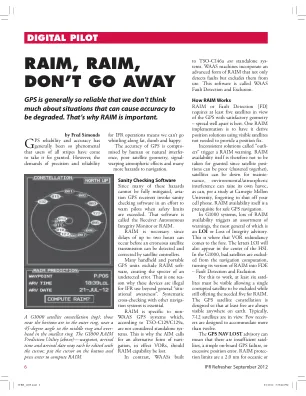
押韵,押韵,不要走开
健全性检查软件由于许多此类危害无法完全缓解,航空 GPS 接收器会调用健全性检查软件,在超出安全限制时向飞行员发出警告。该软件称为接收器自主完整性监视器或 RAIM。RAIM 是必需的,因为在卫星控制器检测和纠正错误的卫星传输之前可能会发生长达两个小时的延迟。许多手持和便携式 GPS 设备不包含 RAIM 软件,从而造成未检测到错误的阴影。这就是为什么这些设备除了一般的“态势感知”之外,不得用于 IFR 使用的原因之一。必须与其他导航系统进行系统性交叉检查。RAIM 特定于非 WAAS GPS 系统,根据 TSO-C129/C129a,这些系统不被视为独立系统。这就是为什么 AIM 呼吁在 RAIM 功能丧失时采用替代导航方式(实际上是 VOR)的原因。相比之下,WAAS 的
押韵,押韵,不要走开
健全性检查软件由于许多此类危险无法完全缓解,航空 GPS 接收器会调用健全性检查软件,以便在超出安全限制时警告飞行员。该软件称为接收器自主完整性监视器或 RAIM。RAIM 是必要的,因为在卫星控制器检测和纠正错误的卫星传输之前可能会出现长达两个小时的延迟。许多手持式和便携式 GPS 设备不包括 RAIM 软件,从而产生了未检测到错误的幽灵。这就是为什么这些设备除了一般的“态势感知”之外,在 IFR 用途上是非法的。与其他导航系统的系统交叉检查至关重要。RAIM 特定于非 WAAS GPS 系统,根据 TSO-C129/C129a,这些系统不被视为独立系统。这就是为什么 AIM 要求在失去 RAIM 功能时采用替代导航形式(实际上是 VOR)。相比之下,WAAS 构建
William J. Hughes 技术中心对 ARAIM 的评估
自 1994 年采用以来,全球定位系统 (GPS) 一直是实现安全高效航空系统的推动力。GPS 完整性,即 GPS 提供的信息正确性的可信度,需要增强以满足民航要求。为确保 GPS 的完整性,航空接收器实施了一种称为接收器自主完整性监测 (RAIM) 的技术。RAIM 允许航空接收器检测 GPS 卫星故障,并且在许多情况下隔离有问题的卫星并使其不再被接收器使用。但是,RAIM 仅为水平操作提供完整性,例如航路和非精密进近。需要额外的完整性来实现高级功能,例如垂直引导进近。已经开发了其他完整性系统,例如 FAA 的广域增强系统 (WAAS),以提供允许这些额外操作所需的完整性。
负责任的人工智能:理解人工智能伦理、法律和治理的框架
• 报告 https://moritzlaw.osu.edu/faculty-research/program-data-and-governance/raim

航空应用用户群
混合架构称为地面区域增强系统 (GRAS)。基于飞机的方法采用内置于用户航空电子设备中的监视器,不需要外部基础设施(GNSS 卫星本身除外)。这些监视器通过检测危险误导信息 (HMI) 实例(指任何威胁性 GNSS 异常)来构建严格的误差界限。与基于飞机的方法相比,其他类型的增强系统都采用地面参考接收器基础设施。这些接收器网络增强了 HMI 监控的灵敏度。此外,这些网络能够广播差异校正,从而显着提高用户准确性。图 1 显示了所有四类增强系统。ABAS 具有明显的优势,因为它几乎可以在任何可以看到 GNSS 卫星的地方使用。虽然 ABAS 可能包含非 GNSS 传感器,但 ABAS 的一个重要子类别是仅 GNSS 的 RAIM。这种方法使用导航解决方案的最小二乘残差来实现监控。较大的残差对应于与其他测量值不同的测量值。通过从导航解决方案中排除不同的卫星测量值,RAIM 可以检测到较大的 HMI 事件,从而可以对导航传感器误差建立更严格的置信界限。为了获得非零残差,RAIM 至少需要一次
TSO-C129a
(1) 最低性能标准。本技术标准令 (TSO) 规定了使用全球定位系统 (GPS) 的机载补充区域导航设备必须满足的最低性能标准,以便通过适用的 TSO 标记进行识别。需要如此识别的使用 GPS 的机载补充区域导航设备,如果在本 TSO 发布之日或之后制造,则必须满足 RTCA, Inc. 文件编号 RTCA/DO-208 第 2 节“使用全球定位系统 (GPS) 的机载补充导航设备最低运行性能标准” (1991 年 7 月) 规定的最低性能标准。 (2) 设备类别。根据本 TSO 批准的设备应通过以下适用的设备类别进行识别: (i) A 类 ( )。同时包含 GPS 传感器和导航功能的设备。此设备应包含本 TSO 第 (a)(3)(xv) 段定义的接收器自主完整性监测 (RAIM)。1. A1 类。航路、终端和非精密进近(航向道、航向道导航辅助设备 (LDA) 和简化导航设施 (SDF) 除外)导航能力。2. A2 类。仅航路和终端导航能力。

PNT 愿景 2035 - Navisp
A2AD 反介入区域拒止 AAM 先进空中机动 ADAS 自动驾驶辅助系统 ADC 模数转换器 A-GNSS 辅助 GNSS AoA 到达角 AI 人工智能 AR 增强现实 CAS 商业认证服务 COTS 商用现货 CSAC 芯片级原子钟 D2D 设备到设备 DL-AoD 下行链路出发角 DL-TDOA 下行链路到达时间差 DME 测距设备 EASA 欧盟航空安全局 EDA 欧洲防务局 EKF 扩展卡尔曼滤波器 E-LORAN 增强型远程导航 EU 欧洲联盟 EUSPA 欧盟太空计划署 GEO 地球静止轨道 GDP 国内生产总值 GNSS 全球导航卫星系统 HAS 高精度服务 ICD 接口控制文件 IoT 物联网 IF 中频 INS 惯性导航系统 KF 卡尔曼滤波器 LANS 月球增强导航服务 LEO 低地球轨道 LCRNS 月球通信中继和导航系统 LITS 线性离子阱 LNA 低噪声放大器 LNSS 月球导航卫星系统 LORAN 远程导航 MAAS 海上自主表面 MCS 主控站 MEMS 微机电系统 MEO 中地球轨道多 RTT 多往返时间行程 NAVAC 导航创新支持计划咨询委员会 NLoS 非视距 OSNMA 开放服务 - 导航消息认证 PKF 粒子滤波器 PNT 定位导航和授时 PPP 精密单点定位 PRS 公共监管服务 PTF 精密授时设施 QKD 量子密钥分发 QoS 服务质量 QZSS 准天顶卫星系统 RAIM 接收器自主完整性监测 RF 射频