XiaoMi-AI文件搜索系统
World File Search SystemRove

盐河项目农业改进和电力区会议通知和议程 - 修订
2024年8月22日草稿盐河项目农业改善和电力区电力委员会会议于2024年8月22日(星期四)上午9:30召集,在亚利桑那州坦佩市北米尔大街1500号的SRP管理大楼的Hoopes Board会议室举行。本次会议是在符合公开会议法律准则的情况下进行的,并通过电话会议进行。地区和盐河谷水用户协会(协会)统称为SRP。在场召集的委员会成员是J.M.小白人,主席; L.C. 威廉姆斯,副主席;和R.J. Miller,K.L。 Mohr-Almeida,M.V。 步伐和P.E. 罗维。 委员会成员缺席,是C. Clowes。 也是卢梭总统;副总裁C.J. dobson;董事会成员M.J. Herrera,K.J。 约翰逊,L.D。 Rove和S.H. 威廉姆斯;理事会主席J.R. Shelton;理事会联络D.B. Lamoreaux和G.E. Geiger;理事会成员R.S. Kolb,C。Resch-Geretti和W.P. Schrader III; mmes。 I.R. Avalos,A.N。 Bond-Simpson,M.J。Burger,A.P。 Chabrier,A.Y。 Gilbert,L.F. Hobaica,L.A。Meyers,K.S。 Ramaley,J.R。Schuricht,C.M。 Sifuentes和P.L. Syrjala; L. Arthanari先生,J.D。 Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。小白人,主席; L.C.威廉姆斯,副主席;和R.J. Miller,K.L。Mohr-Almeida,M.V。 步伐和P.E. 罗维。 委员会成员缺席,是C. Clowes。 也是卢梭总统;副总裁C.J. dobson;董事会成员M.J. Herrera,K.J。 约翰逊,L.D。 Rove和S.H. 威廉姆斯;理事会主席J.R. Shelton;理事会联络D.B. Lamoreaux和G.E. Geiger;理事会成员R.S. Kolb,C。Resch-Geretti和W.P. Schrader III; mmes。 I.R. Avalos,A.N。 Bond-Simpson,M.J。Burger,A.P。 Chabrier,A.Y。 Gilbert,L.F. Hobaica,L.A。Meyers,K.S。 Ramaley,J.R。Schuricht,C.M。 Sifuentes和P.L. Syrjala; L. Arthanari先生,J.D。 Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。Mohr-Almeida,M.V。步伐和P.E.罗维。委员会成员缺席,是C. Clowes。也是卢梭总统;副总裁C.J.dobson;董事会成员M.J. Herrera,K.J。约翰逊,L.D。 Rove和S.H. 威廉姆斯;理事会主席J.R. Shelton;理事会联络D.B. Lamoreaux和G.E. Geiger;理事会成员R.S. Kolb,C。Resch-Geretti和W.P. Schrader III; mmes。 I.R. Avalos,A.N。 Bond-Simpson,M.J。Burger,A.P。 Chabrier,A.Y。 Gilbert,L.F. Hobaica,L.A。Meyers,K.S。 Ramaley,J.R。Schuricht,C.M。 Sifuentes和P.L. Syrjala; L. Arthanari先生,J.D。 Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。约翰逊,L.D。Rove和S.H. 威廉姆斯;理事会主席J.R. Shelton;理事会联络D.B. Lamoreaux和G.E. Geiger;理事会成员R.S. Kolb,C。Resch-Geretti和W.P. Schrader III; mmes。 I.R. Avalos,A.N。 Bond-Simpson,M.J。Burger,A.P。 Chabrier,A.Y。 Gilbert,L.F. Hobaica,L.A。Meyers,K.S。 Ramaley,J.R。Schuricht,C.M。 Sifuentes和P.L. Syrjala; L. Arthanari先生,J.D。 Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。Rove和S.H.威廉姆斯;理事会主席J.R. Shelton;理事会联络D.B.Lamoreaux和G.E.Geiger;理事会成员R.S.Kolb,C。Resch-Geretti和W.P. Schrader III; mmes。 I.R. Avalos,A.N。 Bond-Simpson,M.J。Burger,A.P。 Chabrier,A.Y。 Gilbert,L.F. Hobaica,L.A。Meyers,K.S。 Ramaley,J.R。Schuricht,C.M。 Sifuentes和P.L. Syrjala; L. Arthanari先生,J.D。 Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。Kolb,C。Resch-Geretti和W.P.Schrader III; mmes。I.R. Avalos,A.N。 Bond-Simpson,M.J。Burger,A.P。 Chabrier,A.Y。 Gilbert,L.F. Hobaica,L.A。Meyers,K.S。 Ramaley,J.R。Schuricht,C.M。 Sifuentes和P.L. Syrjala; L. Arthanari先生,J.D。 Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。I.R.Avalos,A.N。 Bond-Simpson,M.J。Burger,A.P。 Chabrier,A.Y。 Gilbert,L.F. Hobaica,L.A。Meyers,K.S。 Ramaley,J.R。Schuricht,C.M。 Sifuentes和P.L. Syrjala; L. Arthanari先生,J.D。 Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。Avalos,A.N。Bond-Simpson,M.J。Burger,A.P。Chabrier,A.Y。 Gilbert,L.F. Hobaica,L.A。Meyers,K.S。 Ramaley,J.R。Schuricht,C.M。 Sifuentes和P.L. Syrjala; L. Arthanari先生,J.D。 Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。Chabrier,A.Y。Gilbert,L.F. Hobaica,L.A。Meyers,K.S。 Ramaley,J.R。Schuricht,C.M。 Sifuentes和P.L. Syrjala; L. Arthanari先生,J.D。 Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。Gilbert,L.F. Hobaica,L.A。Meyers,K.S。Ramaley,J.R。Schuricht,C.M。 Sifuentes和P.L. Syrjala; L. Arthanari先生,J.D。 Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。Ramaley,J.R。Schuricht,C.M。Sifuentes和P.L.Syrjala; L. Arthanari先生,J.D。Coggins,G.A。 Delizio,J.M. felty,J.V。 giacalone,C.R。 Janick,B.J。 Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。Coggins,G.A。Delizio,J.M.felty,J.V。giacalone,C.R。Janick,B.J。Koch,M.J。O'Connor,B.A。 Olsen,J.M. Pratt,R.R。Koch,M.J。O'Connor,B.A。Olsen,J.M. Pratt,R.R。Olsen,J.M.Pratt,R.R。Taylor和J.C. Tucker;西方资源倡导者(WRA)的墨菲·班纳曼(Murphy Bannerman); Leo Bird和Kam Richmond拥有明亮的夜便力;克里斯滕森同事的布鲁斯·查普曼(Bruce Chapman);恒星力量的斯蒂芬·兰德(Stephen Land Jr.);西格里奇的阿曼达·奥蒙德(Amanda Ormond);和公众成员约瑟夫·凡恩·佩斯(Joseph Verne Pace)。符合A.R.S.§38-431.02,公司秘书办公室的安德鲁·戴维斯(Andrew Davis)在2024年8月20日星期二上午9:00在亚利桑那州坦佩市北米尔大街1500号的SRP行政大楼举行了电力委员会会议的通知和议程。主席J.M.怀特(Div> White Jr.)打电话给会议。同意议程主席J.M.怀特(White Jr.
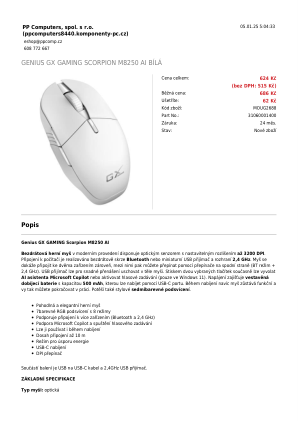
Genius GX GAMING Scorpion M8250 AI 白色 - eshop ppcomp.cz
这款现代设计的无线游戏鼠标具有可调分辨率高达 3200 DPI 的光学传感器。通过蓝牙或微型 USB 接收器和 2.4 GHz 接口以无线方式实现与计算机的连接。鼠标可以同时连接两个设备,您可以使用底部的开关(BT 模式 + 2.4 GHz)在它们之间切换。 USB接收器可以存放在鼠标机身内部,方便携带。通过同时按下两个选定的按钮,您可以调用 Microsoft Copilot AI 助手或激活语音输入(仅限 Windows 11)。电源由容量为 500 mAh 的内置可充电电池提供,可通过 USB-C 端口充电。此外,鼠标在充电时仍能使用,因此您可以继续工作。您还会对时尚的七色背光感到满意。

人工智能在打击网络媒体盗版中的应用
14 BitTorrent 是最著名的 torrent 客户端提供商之一,它提供免费的基本版客户端下载,以及付费版客户端下载,付费版提供 VPN、从程序中删除广告和阻止恶意软件(具体取决于购买的版本)。BitTorrent Classic , B IT T ORRENT ,https://www.bittorrent.com/products/win/bittorrent-classic-free/(上次访问时间为 4 月2021 年 11 月)。15 与 BitTorrent 客户端一样,VPN 也免费提供或按月收费,各公司还提供其他服务。Stefan Larsson 等。al,法律、规范、盗版和在线匿名:全球或文件共享社区中的去身份识别实践,6 J. R ES。互动市场。260, 263 (2012)。16 Adam Rove,美国出版商每年仍因电子书盗版损失 3 亿美元,《福布斯》(2019 年 7 月 28 日)https://www.forbes.com/sites/adamrowe1/2019/07/28/us-publishers-are-still-losing-300-million-annually-to-ebook-piracy/?sh=39255732319e(上次访问时间为 2021 年 4 月 11 日)。17 D AVID B LACKBURN,ET。A L ., 数字视频盗版对美国经济的影响 12 (2019)。18 S STEPHEN E. S IWEK, 声音录制盗版对美国经济的真实成本 1 (2007)。19 Luke Graham, 两年内能制止视频游戏盗版吗?, CNBC (2016 年 1 月 14 日) https://www.cnbc.com/2016/01/14/can-video-game-piracy-be-stopped-in-two-years.html (上次访问时间为 2021 年 4 月 10 日)。

电子通讯
与开罗州长举办社区会议 - 埃及作为其策略的局限性,以征服和统一的统治nize d b y al-alshorouk me d ic a l ad m inistra tion。ib ra sa b e r博士,ca iro的gove rnor博士,长期以来,是一个长期的。在khod r中,ne rm教授中,在khod r中的nt教授,依靠Unive rsity的comm iTm e nt,以使他的comm m unitia intia initia initia tive s,p a rtic ula rly in l the lthc a re re a re re re re re re re re re re re re re re re re re re re re re re re re re re re。She e m p ha size d the im p orta nc e of c olla b ora tion b e twe e n a c a d e m ic institutions, e xe c utive b od ie s, a nd m e d ic a l org a niza tions to a d d re ss c ha lle ng e s a nd im p rove p ub lic se rvic e s, e sp e c ia lly in the他是一位lthc a se cor tor,这是susta ina b le d e v e ve lop m e nt的ke y pilla r。

加拿大月球探索加速器计划(...
加拿大月球探索加速器计划 (LEAP) 探测车任务 (LRM):探索、收集、克服和启发。CE. Morisset 1、M. Picard 1 和 F. Moroso 1,1 加拿大航天局,6767 Route de l'Aéroport,St. Hubert,QC,J3Y 8Y9,加拿大(caroline-emmanuelle.morisset@asc-csa.gc.ca、martin.picard@asc- csa.gc.ca、franco.moroso@asc-csa.gc.ca)。简介:2019 年,加拿大政府宣布了一项新的月球探索加速器计划 (LEAP),将在五年内投资 1.5 亿美元。其目的是通过在月球轨道、月球表面或更远的深空提供技术开发、科学和任务机会,扩大加拿大的太空部门,特别是中小型企业,并为未来的探索任务做好准备。月球车任务(LRM)是 LEAP 的一部分,旨在开发与月球机动系统和月球表面科学研究相关的空间技术。LRM 的主要重点将主要是用作加拿大工业和学术界未来月球车任务能力的前馈演示,此外还将进行机会性科学研究和促进公众参与。任务摘要:该任务将包括在未来 5 年内将一个 30 公斤级的月球车(包括有效载荷)着陆在月球南极,以展示关键技术并完成有意义的月球科学研究。将容纳至少两个科学有效载荷:一个加拿大的,一个美国的。科学目标将与一个或所有 LEAP 科学主题保持一致:(1)了解你的环境; (2) 资源勘探;(3) 宇航员的安全和健康。该探测器将通过商业月球有效载荷服务 (CLPS) 计划与美国国家航空航天局合作运送到月球表面。

分析并提出斯洛伐克人工智能研究、开发和应用的可能性
为了维持其生活水平,并且在全球竞争中不失去人才、投资和高价值工作,欧洲决定联合起来,支持欧洲人工智能领域的卓越中心网络。 2019年7月,欧盟委员会发起对卓越中心网络的支持呼吁,并计划拨款5000万欧元为其提供支持。应建立四个这样的网络,每个网络补贴 1200 万欧元,并向支持机构补贴 200 万欧元2。该笔资金来自“地平线 2020”框架计划。此外,欧盟委员会将 2018-2020 年期间对人工智能的投资与 2014-2017 年期间相比增加了 70%,达到 15 亿欧元。欧盟委员会计划对开发平台和试点项目进行另一项重大投资,金额为 3.9 亿欧元,同时预计成员国将再提供 2 亿欧元,私营部门将贡献 5.5 亿欧元 3 。
d a j e o p r o j e k t u提示:在地astral地区的排水沟和p28和p29的构造。 DěPoltice的主要目标:Realizac
d a j e o p r o j e k t u提示:在地astral地区的排水沟和p28和p29的构造。děpoltice的主要目标附近的城镇场所:实施环境保护措施,并适应景观来气候变化,这是对现有排水沟和新的涵洞建筑物的恢复。从市区和城镇以东的较高山坡上意识到流动的水。由于dna沟的倾斜和涵洞的缺乏,水没有流向鹿的接受者,而是在沟渠中积聚,然后溢出了当地道路的牙冠并流入了发育。为了有效地从休闲盆地的碰撞中转化水,实现了构造。同时,防止了对当地道路和邻近土地的降解影响。建筑有助于保护周围的土地在降水量降水和景观的渗透性。注册号:CZ.24/2.6.4/138.189A/24KT189A收件人补贴:州土地办公室 - 克拉托维分支机构:a)实施环境保护措施,并将景观适应到气候变革项目文档过程:Ingvama工程师和项目Spol。s R.O.,附近85,
Dezinformácie ako hybridná hrozba šírená prostredníctvom ...
Radoslav Ivančík, Jana Müllerová 虚假信息作为一种通过社交网络传播的混合威胁 1 摘要:虚假信息是当今非常严重的混合威胁,近年来社交网络的动态发展和大规模使用加剧了其严重性。在当今现代信息社会,它们已成为敌对混合活动、争夺人心的激烈战场。在这个战场上,人们可以观察到各种军事和非军事战略、战术和工具(例如虚假信息)的使用。因此,该研究作者的首要目标是在使用相关科学方法的跨学科科学研究框架内指出,滥用社交网络传播虚假信息作为旨在影响人们思维的混合威胁的危险和行为并危及先进民主国家的民主进程。关键词:虚假信息、社交网络、混合威胁、互联网、技术。引言 在新千年的头二十年里,随着信息和通信技术的普及和日益深入的使用,人类社会的生活方式和特征以及各领域的运作发生了巨大变化,2政治、社会、经济、安全。随着社会网络化、计算机化程度的不断提高,快速发展、海量

平衡记分卡模型
平衡记分卡是评估业务效率的战略框架。它用于制定战略,确保遵守不同群体的利益并提供社会概述。该系统基于原因和后果的原则,并使用KPI指标来衡量其目标。此外,平衡记分卡是一个复杂的模型,它定义了四个关键领域:财务,客户,内部流程以及学习与成长。这些领域允许公司对其战略环境进行完整概述,并管理其活动以实现长期增长。平衡记分卡(BSC)是一个全面的系统,用于监视和控制由几个关键要素组成的企业。第一步是将组织的目标转移到个人级别的员工层面,以了解实现公司战略目标的每个角色。此外,创建了战术计划和操作任务,以确保实施战略。另一个重要因素是反馈,它分析了公司绩效的衡量标准,并将新获得的知识应用于实践中。BSC是一个团队合作,受到高层管理人员的驱动,影响了公司的所有员工。员工必须了解模型的原则以及其任务的特定好处,以实现公司战略。除了将目标传输到现实生活外,该模型还在规模之间建立了平衡,从而导致整个公司的长期稳定发展。反馈过程提高了模型使用的效率,并促进了内部环境中的变化。非常重要地可视化,不仅支持与工人进行战略的交流,而且还显示了公司战略的逻辑。可视化不仅说明社会想要做的事情,还说明它将如何做和控制它。不必从一开始就将BSC介绍到公司的所有级别。首先,建议将BSC模型用于第一个组织级别(部门,部门,业务部门...),然后进一步向个人雇员继续前进。BSC的优势是意识和使用关系原因和后果。BSC的个别目标和指标与逻辑联系相关,并可以明确确定原因和后果(驱动力和绩效指标)。例如,合同实施领域工人知识的增加导致实施时间减少以及缺陷和分歧的数量。这会缩短交货日期并提高客户的满意度,这可能意味着更大的订单或更高的价格,从而获得利润。BSC模型展示了一种旨在提高公司绩效和价值的行为方式。可以轻松地将平衡记分卡模型中描述的公司战略引入所有员工,这些员工可以轻松而实际地在BSC模型中找到自己的位置以及在公司的战略中所占的份额。通过将BSC与薪酬系统联系起来,将支持工人在实现公司及其战略的长期目标方面的利益。平衡记分卡:一种策略绩效管理工具和结构良好的报告,用于跟踪员工执行活动的执行并监视这些行动的后果,被称为平衡记分卡。它主要是管理团队使用的绩效管理报告,专注于管理战略实施或运营活动。这两个是补充工具,而不是重复。22(4):97–107。平衡记分卡的概念首先在1992年由卡普兰和诺顿的文章中引入,这成为了一个普遍的成功,并于1996年引发了其第二本书《平衡记分卡》的出版。尽管他们经常归功于创建这个概念,但它的源自管理文献和实践,可以追溯到19世纪。绩效衡量和报告的想法受到各种因素的影响,包括通用电气在1950年代对绩效测量报告的工作以及创建Tableau de Bord的法国工艺工程师。伊迪丝·彭罗斯(Edith Penrose)提出的基于资源的公司的观点也发挥了重要作用。卡普兰和诺顿的书,尤其是他们的第一本书,反映了平衡记分卡的最早化身,后来在其第二本书《以战略为中心的组织》中进行了完善。但是,随着时间的流逝,重点从设计平衡的计分卡本身转变为将其作为更广泛的战略管理系统的一部分。随后的关于该主题的文章集中在其应用程序和用途上,许多作者都在完善了该概念。平衡计分卡的关键特征是在简明的报告中介绍了财务和非财务措施的混合,该报告总结了利益相关者最相关的信息。选择此内容的设计过程是使平衡记分卡与传统报告区分开的原因。该工具的各种迭代随着时间的流逝而发展,并且通过要求将战略性陈述转换为更具体的措施,已成为组织策略的有用指标。(1998)。平衡记分卡的初始版本着重于衡量与公司战略相关的结果,但是随后的设计已包含其他类别,例如客户,内部业务流程以及学习和成长。这些早期设计是针对美国商业业务量身定制的,但后来的迭代已解决了包括公共部门和非营利实体在内的不同组织的需求。现代平衡记分卡更加灵活和有效,并结合了使其易于实施的设计方法。出现了许多替代设计,通常应用有限,但有些促成了该概念的发展。平衡的记分卡从几代人开始发展,从奥尔夫(Olve),罗伊(Roy)和韦特(Roy&Wetter)的性能驱动程序模型(1997)作为第二代。接下来是第三代设计,该设计将策略地图与长期结局文件(称为“目的地”声明”相结合。存在平衡记分卡的各种改编,以适合不同的观点和议程,例如三重底线和决策支持系统。联合国基于结果的管理系统与第三代平衡记分卡方法共享结构性相似性。尽管不是最初是为激励付款而设计的,但有时将平衡计分卡用于此目的。设计平衡的记分卡涉及确定关键的财务和非财务措施,设定目标以及对期望的监视绩效。此集成需要考虑平衡记分卡如何适合更广泛的业务管理过程。随着时间的流逝,战略规划与平衡记分卡设计之间的界限变得模糊,许多组织都将两者的要素纳入其管理流程。由Kaplan&Norton概述的设计平衡记分卡的四个步骤包括将视觉转化为操作目标,通过个人绩效,业务计划和索引设置进行反馈和学习来传达愿景。这些步骤强调了在设计有效平衡记分卡系统时需要进行集成思维的必要性。第一代平衡记分卡设计采用了四个观点的方法:财务,客户,内部业务流程以及学习与成长。财务观点的重点是现金流,销售增长和股本回报率等关键财务指标。客户的观点旨在通过新产品销售百分比和交付时间等措施来了解对客户和利益相关者的重要内容。内部业务流程的观点试图通过周期时间和单位成本等指标在核心业务流程上表现出色。最后,学习与成长的观点通过产品开发时间和市场份额等措施鼓励了创新和改进。但是,这些类别与非营利,公共部门组织或具有高内部专业化的复杂实体的相关性不大。这导致了针对这些群体量身定制的替代观点的建议,这使得在早期平衡记分卡设计中选择措施的选择是挑战的。这给战略目标提供了更多相关性和功能。14(3):402–414。因此,用户通常对这些早期式平衡记分卡提供的信息缺乏信心,尽管这些记分卡仍然存在局限性。这种方法在完成后被许多人放弃,并在1990年代中期出现了一种新的方法。[16]改进的设计方法涉及基于在战略链接模型或策略图上绘制的战略目标选择措施。[43]这种方法在四个测量观点上分发了战略目标,以创建战略和措施的视觉呈现。[7]经理在每个角度选择一些战略目标,定义它们之间的因果链,并创建战略链接模型。[43]然后通过为每个战略目标选择一两个措施来得出平衡的记分卡。[7]自1996年以来,这种设计风格已被广泛采用,代表了早期方法的独特方法,通常被称为平衡记分卡设计的“第二代”。[7]在1990年代后期,由于在多个战略目标之间绘制因果关系,忽略当前管理活动以及需要提及其他设计工具的限制,这种方法再次发展。[7]已提出了包含目的地声明的设计方法代表平衡记分卡设计的“第三代”,通过选择适当的战略活动和结果目标,提供了更全面的方法。其他关键组成部分包括观点,措施和倡议。这导致缺乏对设备的信任和互动。[7]发现第三代平衡记分卡可以通过合并目标语句和战略链接模型之类的功能来改善以前的版本。在政府机构,企业,非营利组织和教育机构等各个部门都采用了平衡记分卡的使用。通常被认为是基于年度调查的最流行的绩效管理框架。然而,批评家对设计过程本身缺乏严格性的担忧提出了担忧,一些人认为早期实施中的失败是由于顾问在远程设计记分卡而没有预期用户的投入的情况下造成的。学术批评可以分为三个领域:缺乏严格性,缺乏整体分数以及对所使用方法的技术健全性的担忧。有些人指出,关于平衡记分卡的早期文章未能为其想法提供引用或验证。其他人在原始设计中突出了缺陷,包括选择观点,以及缺乏明确建议的统一性能观点。平衡计分卡是衡量组织绩效的框架,因其局限性而受到批评。一种批评是,它无法完全反映所有利益相关者,尤其是非财务利益相关者的需求,并对金融利益相关者有偏见。由Kaplan和Norton开发的原始概念是为美国商业组织设计的,重点是投资回报。但是,这些研究并未为其负面发现提供理论解释。^ Andersen等。虽然已经发现平衡记分卡在某些情况下是有效的,但必须在设计复杂性与可用资源相关性之间取得平衡。一些批评家认为,由于长期的战略重点和对绩效衡量的知识,中小型企业(SME)不适合使用这种方法。平衡记分卡本身并不是一个复杂的工具,通常包括在财务和非财务主题中进行的20个措施,可以使用简单的Office软件手动报告。收集和报告数据的过程可能是劳动密集型的,并且容易出现程序问题。在更简单的组织中,诸如电子邮件或电话等临时方法可能就足够了。在更复杂的组织中,由于不同记分卡之间需要协调,因此个人记者的使用变得有问题。在这些情况下,组织通常依靠平衡的记分卡报告软件来自动化报告生产和分销。策略执行和平衡的记分卡塞斯·A·列文森(Seth A. Levenson);迈克尔·波特(Michael D. Porter)(1980)。“适应环境变革:组织学习的作用”。加利福尼亚管理评论。doi:10.2307/40069653。^ A B C D E F G H I J K L M N O P Q R S T U V W X Y Z Levenson,E。(1989)。“组织学习”。 管理学院评论。 doi:10.2307/4099755。 ^ a b c d e f leffler,K。B. “组织设计和绩效”。 哈佛商业评论。 ^ Kellermans等。 ^ Adams等。“组织学习”。管理学院评论。doi:10.2307/4099755。^ a b c d e f leffler,K。B.“组织设计和绩效”。哈佛商业评论。^ Kellermans等。^ Adams等。Simmons,J。E. L.(2003)研究了绩效测量工具,例如平衡计分卡和EFQM卓越模型,以衡量业务卓越。发现平衡记分卡可以帮助进行质量管理。^ 2GC主动管理指南有助于链接公司和个人绩效管理系统。^ Muralidharan创建了一个用于设计策略内容抑制的框架。^罗伯特·西蒙斯(Robert Simons)在控制杠杆中撰写了有关创新控制系统的文章:经理如何使用创新的控制系统来推动战略性更新。^埃里克·弗拉姆霍尔茨(Erik Flamholtz)讨论了将平衡和有效性置于平衡记分卡中。着眼于战略对准。^ Kaplan&Norton说,将平衡记分卡与战略联系起来很重要。^乔尔·库尔茨曼(Joel Kurtzman)写道,了解了为什么一家公司在财富中脱颖而出。^ Rigby&Bilodeau发现Bain&Company的管理工具和趋势调查2003非常有用。^ Schneiderman说平衡计分卡经常失败。^ Norreklit批评了平衡记分卡上的一些假设。^ Lingle&Schiemann研究了测量如何改善策略。^詹森谈到了价值最大化,利益相关者理论和公司目标。审查了性能测量框架。在各种研究中探讨了平衡记分卡,包括劳里(Lawrie)和同事在公共部门的战略管理以及复杂组织内的多层次保持一致性。另一项研究分析了BSC和IC在非营利组织中的实用性,而Ittner等人。的工作着重于金融服务公司的绩效影响。Lawrie和Andersen的贡献检查了中小型企业(SME)中的平衡记分卡实施。这些发现发表在学术期刊上,例如智力资本,会计,组织和社会以及管理中的建模杂志。