XiaoMi-AI文件搜索系统
World File Search SystemSonobuoy

文章 使用低精度异构声纳浮标传感器的纯角度测量来定位水下目标
摘要:本文考虑了水下目标的定位,其中放置了许多声纳浮标来测量目标声音的方位。声纳浮标的方位精度非常低,例如 10 度。在实践中,我们可以使用多个异构声纳浮标,这样传感器噪声的方差可能与另一个传感器的方差不同。此外,一个传感器的最大感应范围可能与另一个传感器的最大感应范围不同。如果传感器检测到目标的方位,则真实目标必须存在于传感器的感应范围内。为了基于低精度的方位测量来估计目标位置,本文介绍了一种基于多个虚拟测量集 (VMS) 的新型目标定位方法。这里,每个 VMS 都是考虑到每个声纳传感器的方位测量噪声而得出的。据我们所知,本文在考虑传感器的最大感应范围的情况下,基于低精度的异构声纳浮标传感器对目标的 2D 位置进行定位方面是新颖的。通过使用计算机模拟将所提出的定位方法与其他最先进的定位方法进行比较,验证了所提出的定位方法的优越性(同时考虑时间效率和定位精度)。

复杂环境下不规则声呐浮标模式的设计和性能 Donald R. DelBalzo Kevin C. Stangl 技术解决方案集团 OPNAV N874 QinetiQ 北美 NC1/Suite 1200 40201 Hwy 190 E 2000 海军五角大楼 Slidell, LA 70461 华盛顿特区 20350-2000
摘要 - 冷战期间开发了用于深而均匀的海底环境的最佳单基地声纳浮标场模式,其中可以使用简单的中值检测范围来定义声纳浮标之间有用的固定间距。然而,当前经常进行作战的沿海环境中的海洋和声学条件非常复杂和动态,以至于空间和时间的变化破坏了与传统战术搜索概念相关的同质假设。已经开展了几项研究工作来设计更好的被动和单基地主动声纳浮标位置,但其中大多数是评估算法,而不是真正的规划算法。一种不同的算法方法已成功开发并最初应用于单基地移动传感器,该方法从一组随机的传感器位置开始,然后使用遗传算法找到接近最优的解决方案。遗传算法解决方案是非标准搜索路径,可适应复杂的海洋学、可变的底部特性和假定的目标战术 [DP Kierstead 和 DR DelBalzo,军事作战研究杂志(2003 年 3 月/4 月)]。随后开发了一种新功能,用于优化复杂沿海环境中多基地主动声纳浮标的位置(纬度、经度和深度)和 ping 时间。这些算法称为 SCOUT(传感器协调以实现最佳利用和战术)。SCOUT 对移动传感器遗传算法方法进行了两项重大修改,以考虑双基地和多基地声纳浮标领域,其中每个接收器都能够观察来自每个来源的数据。第一个是结构上的修改,引入了一条新染色体来描述战术计划。它为每个声纳浮标提供一个基因,由一个位置、一个有序的部署序列和一组 ping 时间组成。新染色体中的位置和时间独立变异,并以不规则模式和非连续 ping 序列为特征。第二个修改是在检测建模方面,引入了一种新的双基地检测模型。它允许结合相干和非相干处理。对于这项工作,我们假设可以同时监控所有声纳浮标。SCOUT 算法是我们之前的遗传算法工作的扩展,据我们所知,它们代表了唯一从头开始设计复杂环境中多静态主动声纳浮标位置的解决方案,而不是推荐一般的努力分配或简单地评估具有不同参数的标准模式。本文讨论了新的染色体结构和现实环境中的模拟结果。结果表明:a) SCOUT 可以有效地使多静态传感器场适应
使用低精度异构声纳浮标传感器的纯角度测量定位水下目标
摘要:本文考虑了水下目标的定位,其中放置了许多声纳浮标来测量目标声音的方位。声纳浮标的方位精度非常低,例如 10 度。在实践中,我们可以使用多个异构声纳浮标,这样传感器噪声的方差可能与另一个传感器的方差不同。此外,一个传感器的最大感应范围可能与另一个传感器的最大感应范围不同。如果传感器检测到目标的方位,则真实目标必须存在于传感器的感应范围内。为了基于低精度的方位测量来估计目标位置,本文介绍了一种基于多个虚拟测量集 (VMS) 的新型目标定位方法。这里,每个 VMS 都是考虑到每个声纳传感器的方位测量噪声而得出的。据我们所知,本文在基于低精度的异构声纳浮标传感器定位目标的 2D 位置方面是新颖的,考虑到传感器的最大感应范围。通过使用计算机模拟将所提出的定位方法与其他最先进的定位方法进行比较,验证了所提出的定位方法的优越性(同时考虑时间效率和定位精度)。
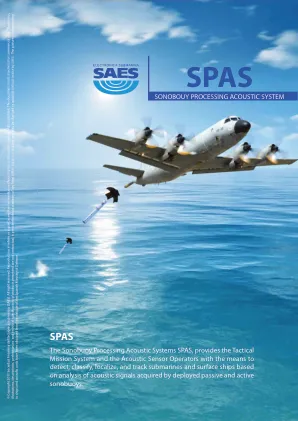
声纳浮标处理声学系统 SPAS 为战术任务系统和声学传感器操作员提供基于部署的被动和主动声纳浮标获取的声学信号的分析来检测、分类、定位和跟踪潜艇和水面舰艇的方法。
- SPAS 处理特殊用途声纳浮标、模拟声纳浮标(被动和主动)和新型数字声纳浮标。 - 声学性能预测计算,提供射线追踪和最大检测范围(MDR 和 PDR)。 - 通过窄带分析、宽带分析、瞬态、恶魔、双恶魔、扫描带分析和交互式 ACINT 数据库进行检测和接触分类。 - 以不同格式显示的声学信息:ALI、LFI、BFI、ARI、DRI、BRI。 - 与部署的声纳浮标相关的战术信息显示在地理图上,允许使用定位辅助工具: - 被动声纳浮标的能量图 - 主动声纳浮标的多静态图 - 手动交叉固定、LOFIX、HYFIX、CPA 和 Lloyd 镜像工具。 - 自动交叉固定、卡尔曼滤波器、TMA 和 DOP-CPA 工具。 - 根据威胁过滤器自动本地接触警报。 - CSG 和 CFS 命令发射。 - 海量数字存储设备,用于记录任务数据和信号以供飞行后分析。

使用“azigrams”显示声纳浮标的生物声学方向信息
AN/SSQ-53 定向频率分析和记录 (DIFAR) 声纳浮标是一种消耗性设备,可以沿两个正交水平轴推导出声粒子速度以及声压。通过此信息,只需一个紧凑型传感器便可计算出低频声源的方位角。估算这些传感器方位角的标准方法是通过传统的波束形成(即添加加权时间序列),但得到的“心形”波束模式不精确、计算成本高,并且对于弱信号容易受到方向性噪声污染。这里演示了一种替代乘法处理方案,该方案计算声信号的“有效强度”以获取噪声场作为时间和频率函数的主要方向性。此信息可以方便地显示为“方位图”,类似于频谱图,但使用颜色来表示方位角而不是强度。来自多个位置的数据证明了这种方法,无需对原始信号进行解复用即可进行计算。Azigram 已用于帮助诊断声纳浮标问题、提高可检测性和估计低信噪比信号的方位。Azigram 还可以增强对定向噪声场中嵌入信号的检测和潜在分类。V C 2019 美国声学学会。https://doi.org/10.1121/1.5114810

UCGE 报告 - 卡尔加里大学
第二章:水下目标跟踪 ................................................................................................22 2.1 声纳系统基本原理 ......................................................................................................22 2.1.1 传输损耗 ................................................................................................................23 2.1.1.1 声速剖面(SVP) ......................................................................................24 2.1.1.2 声音传播路径 ................................................................................................25 2.2 反潜战目标的声源 ......................................................................................................32 2.3 声纳浮标设备 .............................................................................................................34 2.4 被动声纳浮标 .............................................................................................................35 2.5 DIFAR 声纳浮标 .............................................................................................................37 2.5.1.1 系统操作 .............................................................................................................37 2.5.1.2 信号处理技术及其局限性 .............................................................................39 频谱分析 ................................................................................................................40 2.6研究进展与现状................................................................................48 2.6.1 目标检测......................................................

卓越的机载运输和测试系统 - Alkan。
摘要 ALKAN 集团 .................................................................... ALKAN 集团解决方案.............................................................. ALKAN 设备 轻型弹射器释放装置................................................重型弹射器释放装置和能源............ 电动机械释放装置........................................ 吊架........................................................................................ 轻型飞机吊架(桅杆)........................................................ 多用途运输机........................................................................ 双存储运输机........................................................................插塞连接设备............................................................. 存储管理系统 (SMS)........................................................ 声呐浮标发射器........................................................................ 吊舱........................................................................................ 箔条和照明弹投放器........................................................地面支持设备................................................................ SECA 设备测试台........................................................................ 电子测试设备........................................................ 民用飞机嵌入式电子设备............ 军用飞机嵌入式电子设备............ 硬件和软件........................................................................特定组件/MRO 和客户支持........... ALKAN 集团全球和质量方法....................

声学海洋浮标遥测系统 - SiPLAB
空中 RaN 和水下 AcN,从而形成一个无缝网络。此外,“先进”声纳浮标可用作获取数据预处理和数据融合的中间步骤,通过此步骤可实现数据缩减。这种数据缩减意味着更短的数据上传时间,这是在敌对地区执行 REA 操作的重要前提,因为空中 RaN 节点的长期存在可能会影响任务的成功。敌对地区行动表明,“先进”声纳浮标领域必须集成一个可以随时添加或抑制节点的网络,即使使用单个“先进”声纳浮标也能执行精简的操作。声学海洋浮标 (AOB) 遥测系统希望满足“先进”声纳浮标的特性。它使用标准“IEEE 802.11”WLAN 配置集成空中 RaN,并使用水听器阵列和声源集成水下 AcN。第一台 AOB 原型机在 2003 年 [3] 和 2004 年 [4] 的海事快速环境评估海上试验中进行了测试。2005 年 9 月 15 日至 10 月 2 日,在美国夏威夷考艾岛附近的 MakaiEx 海上试验中对 AOB 的现行版本进行了测试,此次试验是在美国圣地亚哥 HLS Research Inc 推动的高频计划的背景下进行的。下面将描述 AOB 的设计,讨论主要的系统特性,介绍 MakayEx AOB 工程测试,并指出未来的发展。系统设计 AOB 的物理特性在高度(1.2 米)、直径(16 厘米)、重量(40 公斤)和自主性(12 小时)方面与标准声纳浮标相似。然而,AOB 具有先进的功能,包括:独立或网络操作;本地数据存储;专用信号处理;GPS 授时和定位;实时数据传输和中继。本节简要介绍了AOB硬件和软件,并给出了“基站”(空中RaN节点)的主要特性。

Gannett 电子 - 2008-10-20
简介 作为一种武器系统,Gannet 的“心脏”是其电子设备。它包含全面的电子设备,使其能够执行其设计的各种任务。其主要任务是探测、定位和摧毁敌方潜艇。为了完成这一任务,飞机配备了搜索雷达和声纳浮标系统。还安装了其他电子系统,用于通信(包括内部和外部)和导航。各种设备都分配有一个“飞机无线电装置”(ARI)编号,该编号指定了每个装置中使用的实际设备。这些设备可能因飞机的不同而不同,具体取决于特定飞机要执行的任务。附录“A”中显示了 ARI 的交叉引用列表。各种设备可分为以下四大类:a. !通信
聪明背后的聪明人......
由于英镑兑美元走强,收入下降 1.1%,但按有机基础计算,收入增长 4.2% 至 8.507 亿英镑(2020 年:8.598 亿英镑)。尽管疫情导致生产力下降和供应链中断,导致部分销售额从上一季度下滑至 2022 年,芯片短缺对我们的声纳浮标业务部门影响尤为严重,但海事和情报与通信战略业务部门的有机收入增长均远高于其市场水平,分别增长 6.3% 和 5.5%。在关键检测与控制方面,军用航空航天的稳健销售、弹道识别市场的出色销售以及公务机的一些复苏在很大程度上抵消了疫情导致的商用航空航天持续疲软的影响,全年有机收入基本持平,为 2.14 亿英镑(2020 年:2.27 亿英镑)。