XiaoMi-AI文件搜索系统
World File Search SystemUnmanned
反击 - 无人系统研究
a。 ALSSA探讨了2016年开发反无人空中系统(C-UAS)多服务策略,技术和程序(MTTP)手册的潜力。基于当时可用的研究,确定该主题的发展不足以保证独立的MTTP。同时,ALSSA已经发布了无人驾驶系统MTTP,其中许多C-UAS主题都被解决了。2017年,由于与较大类别的无人驾驶飞机和载人飞机的相似之处,MTTP无人空中系统合并为MTTP空气和导弹防御。MTTP空气和导弹防御,第六章专门用于反对无人飞机系统,以代替独立的MTTP,这也是由于反击载人和无人驾驶航空系统的相似之处。 基于无人系统的增加,JASC在2024年指示ALSSA对基于无人系统的不对称威胁,对无人机威胁的无人系统(C-US)MTTP进行了一项研究,该系统对无人系统构成了关节力量。MTTP空气和导弹防御,第六章专门用于反对无人飞机系统,以代替独立的MTTP,这也是由于反击载人和无人驾驶航空系统的相似之处。基于无人系统的增加,JASC在2024年指示ALSSA对基于无人系统的不对称威胁,对无人机威胁的无人系统(C-US)MTTP进行了一项研究,该系统对无人系统构成了关节力量。

无人的表面车辆竞赛...
•应由在Türkiye和国外学习的高等教育(副教育,本科和研究生)的聚会(副教育,本科和研究生)组成。•强制参加团队参加比赛。•团队必须至少由3人组成,最多由15人组成。除此之外,团队只能将1个人作为辅导员。•可以由一所学校组成,也可以与一个或多个高等教育学生组成混合团队。•决赛团队必须为学生提交批准的学生文件,并获得批准的文件,以表明他们是顾问的教职员工/助理,研究助理或教师。•竞争包括一个类别。•团队可以担任讲师/会员或研究助理作为顾问。•竞争对手不能参与上一个项目报告的相同和/或复制报告。如果在上一年报告范围内在www.teknofest.org上发表的报告引用了报价,则来源必须

塞浦路斯:无人管理的水下车辆...
有关评论截止日期的信息:1。每个感兴趣的经济运营商有兴趣被授予合同,持续或可能由于合同权威的行为或决定而受到损失,该法案或决定在合同的签署签名之前,并据称该法案违反了该法律的任何权利,违反了该法律的任何权利,违反了该法律的审查权,请根据规定审查法律,根据规定的审查,根据规定的审查,根据规定的法律,该法律是根据规定的法律审查法律,该法律是根据规定的规定,该法律是规定的法律,该法律审查了法律的规定。 104(i)/2010)。2。要向招标审查授权提供诉讼,申请人必须支付不可退还的费用,该费用存入通用政府帐户。更多详细信息在招标审查局(www.tra.gov.cy)的网站上给出。关于申请申请的方式和程序,对这些申请的方式以及有关裁定的裁定的程序,《法律规定》涉及审查程序涉及2010年公共合同的审查程序(法律104(i)/2010年)。

无人驾驶的优雅 无与伦比的适应性
Teros 采用 Sonex Aerospace 久经考验的动力滑翔机机身。Sonex 设计提供了极其坚固的飞机,每飞行小时成本非常低,总生命周期成本也非常低。自 2003 年推出以来,机身已记录了数千小时无故障飞行,包括滑翔、越野和特技飞行。这款可靠的无人机现已融入 Teros 的设计中,集成了关键的冗余飞行控制系统和智能电气系统,以防止复杂的故障。令人惊讶的敏捷 Teros 具有坚固的结构和耐用性,同时又不牺牲其轻量化设计。凭借短距离起飞和降落能力、快速现场组装、快速维修和自主飞行操作,Teros 是一个用途广泛且性能强大的空中平台。

无人系统路线图:2007-2032
随着国防部 (DoD) 在未来 25 年(2007 年至 2032 年)开发和使用日益复杂的无人系统部队,技术人员、采购官员和作战规划人员需要制定一个清晰、协调的无人系统技术发展和过渡计划。随着本文件的发布,UAS、UGV 和 UMS(定义为无人水下航行器 (UUV) 和无人水面航行器 (USV))的单独路线图和总体规划已被纳入全面的国防部无人系统路线图中。这份综合无人系统路线图是未来优先考虑和资助这些系统开发和技术的计划,从而确保国防部投资的有效回报。根据战略规划指导 (SPG),其总体目标是指导军事部门和国防机构以逻辑和系统的方式将适用的任务能力迁移到这一新型军事工具上。本路线图重点介绍了各种无人系统在技术和操作上支持的最紧迫的任务需求。在优先考虑未来无人系统技术的研究、开发和采购时,应考虑以下列出的这些需求,以确保国防部的投资获得有效回报。
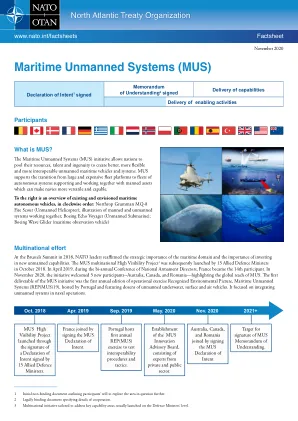
海上无人系统 (MUS)
在 2018 年布鲁塞尔峰会上,北约领导人重申了海洋领域的战略重要性以及投资新无人能力的重要性。随后,13 个盟国国防部长于 2018 年 10 月启动了 MUS 多国高能见度项目 3。2019 年 4 月,在两年一次的国家军备总监会议上,法国成为第 14 个参与者。2020 年 11 月,该计划迎来了 3 个新参与者——澳大利亚、加拿大和罗马尼亚——突显了 MUS 的全球影响力。MUS 计划的第一个成果是第一届年度作战演习“公认环境图、海上无人系统”(REP(MUS)19),由葡萄牙主办,有数十艘无人水下、水面和空中航行器参加。其重点是将无人系统整合到海军行动中。