XiaoMi-AI文件搜索系统
World File Search SystemXLI
轻松击败市场的板块轮动策略......
• 材料 (XLB) • 能源 (XLE) • 金融 (XLF) • 工业 (XLI) • 科技 (XLK) • 消费必需品 (XLP) • 公用事业 (XLU) • 医疗保健 (XLV) • 非必需消费品 (XLY)
摘要书
欢迎代表西班牙药理学学会,我很高兴欢迎您参加2024年10月3日至5日在Caixaforum举行的西班牙药理学会XLI全国会议。作为先前的版本,会议有望从其他学科,例如化学家,药剂师和医生等其他学科的科学家那里收集大量的药理学家和科学家。我们正在组织一个令人惊叹的科学计划,涵盖了药理学和治疗学的前线领域。自从我们社会的未来传达了年轻一代,在本次会议上,我们指导我们的主要重点通过简短的科学成果来促进早期职业科学家的参与,并通过支付他们通过赠款参加会议的费用。除了科学部分外,帕尔马是一个度假胜地,拥有超过40万居民和西班牙马略卡岛(马略卡岛)的首都,位于西地中海。大型的圣玛丽亚大教堂(SantaMaríaCathedral)始于13世纪,俯瞰着帕尔马湾(Bay of Palma),并且是会议横幅的灵感。相邻的Almudaina是摩尔风格的阿拉伯堡垒,转变为皇家住所。在城市西部,希尔托普·贝尔弗城堡(Hilltop Bellver Castle)是一个具有独特圆形形状的中世纪堡垒。更不用说该岛必须要的原始沙子和绿松石的水!由于所有这些原因,我们期待在西班牙药理学学会XLI全国会议上与您会面。
潜水手册 Rev 7 Change A.pdf
标题页。。。。。。。。。。。。。。。。。。。。。。。。标题页 2 空白。。。。。。。。。。。。。。。。。。0 A 到 B. .。。。。。。。。。。。。。。。。。。。。。认证表。。。。。。。。。。。。。。。。。空白认证表 2。。。。。。。。。。。0 变更记录。。。。。。。。。。。。。。。。。变更记录-2 空白。。。。。。。。。。0 G(前言),H 空白。。。。。。。。。。。。。。0 安全摘要 I-Q。。。。。。。。。。。。。。。。A R 空白。。。。。。。。。。。。。。。。。。。。。。。。。.0 i 至 iv,xiv 至 xxvii,xxix 至 xxxi ..........0 xxxiii 至 xli,xliii 至 xlviii,l 至 lii ..........0 v 至 xiii、xxviii、xxxii、xlii、xlix 。。。。。。。。。A 卷。1 标题页,标题页-2 空白。。。。。0 1-i 至 1-iv 。。。。。。。。。。。。。。。。。。。。0 1-v 到 1-ix。。。。。。。。。。。。。。。。。。。。A 1-x 到 1-xiv。。。。。。。。。。。。。。。。。。。0 1-1 到 1-13、1-15 到 1-21、1-23 到 1-32 。。0 1-14, 1-22 。。。。。。。。。。。。。。。。。。。。。。。。A 1-15 到 1-13。 。。。。。。。。。。。。。。。。。0 第 3 章 .。。。。。。。。。。。。。。..........A(更改包括:3-18、3-19、3-32、3-37、3-61、文本流更改)第 4 章 ..。。。。。。。。。。。。。。。。。。。。。。A(更改包括:4-1、4-5 至 4-7、4-9、删除 4-3 上的两条注释、删除 4-14 上的两条注释、文本流更改)5- 1、5-4、5-9 至 5-10 。。。。。......。 。 。 。 。 。 0。。。。。。0
政策海洋中的ETF(中国刺激计划、美国FOMC)
股票代码 名称 内容 最近一周回报率(%) XLB 材料精选行业 SPDR ® ETF 材料 3.2 IBIT iShares 比特币信托 ETF 比特币 2.9 XLK 技术精选行业 SPDR ® ETF 科技 2.1 XLY 可选消费精选行业 SPDR ® ETF 可选消费 2.0 QQQ 景顺 QQQ 信托 纳斯达克 1.5 XLI 工业精选行业 SPDR ® ETF 工业 1.1 SPY SPDR ® 标准普尔 500 ® ETF 信托 标准普尔 500 0.7 XLC 通信服务精选行业 SPDR ® ETF 电信 0.6 XLP 必需消费品精选行业 SPDR ® ETF 必需消费品 -0.2 VNQ Vanguard 房地产 ETF 房地产 -0.4 XLU 公用事业精选行业 SPDR ® ETF 公用事业 -0.6 ITB iShares 美国住宅建筑 ETF美国房地产 -0.6 TLT iShares 20+ 年期国债 ETF 长期债券 -0.8 XLRE 房地产精选行业 SPDR ® 房地产 -1.0 XLF 金融精选行业 SPDR ® ETF 金融 -1.4 XLV 医疗保健精选行业 SPDR ® ETF 医疗保健 -1.4 KRE SPDR ® 标准普尔地区银行 ETF 美国地区银行 -3.2 XBI SPDR ® 标准普尔生物技术 ETF 生物技术 -3.4 XLE 能源精选行业 SPDR ® ETF 能源 -3.7

科学与艺术杂志。
在此期刊以前的回忆录中,已在回忆录中详细解释了头脑化的原则,*我将参考该主题的详细插图。在这些插图中,读者的注意力尤其引起了甲壳类动物的注意,从1837年至1855年至1855年至1855年 - 在我面前,我对哪个超过一半的时间进行了研究。It cannot fail to be perceived, in the review, that, with ele- vation in grarle among the Decapods, for example-passing upward along the line of Macrural forms to the Brachyural (or fr:om the lowest of shrimp-like species to crabs)-there is in general, with the rising grade, an abbreviation relatively of the abdomen, an abbreviation also of the cephalothorax and天线和其他头膜器官,以及在结构之前和后面的压实;腹部的变化从 *有关以前关于头化的论文的变化,请参见本期刊,= ii,14,1856; = xv,65,xxxvi,1,159,321,440,1863; xxxvii,10,157,1864; Xli,163,1866。在这些论文中提出的一个点,我会撤回,即:人类的前对成员从机车上转移到头孢菌系列类似于从甲壳类动物传递到decapod的转移到decapod类型的转移,或者从弧形类型或从弧形类型到昆虫类型。后者显然是结构转移,是甲壳类动物中的两个前对四肢,或者是昆虫类中的四肢,通过转移,严格地是头孢菌器官(与口腔系列有关),因此存在于大型物种部落中。但在人中,它仅是一种功能转移,类似于蜘蛛和四冠的病例,那里的前腿被适应在功能上以嘴或头部的功能,而没有结构转移,这将使它们自身以更高顺序的限制。

CV SloaneCV Sloane
注意:在计算机,数据和信息科学领域中,在排名最高的,高度选择性会议的会议记录中发表的完整论文被视为比期刊文章同样重要(如果不是更重要)。这些经过高度同行审查(典型的接受率从15%到30%),是档案出版物。在此类出版物下面标有 *。相关的是,计算机,数据和信息科学上的论文列出了最高级的教职员工,该教师在作者列表中最后一次监督研究。Sloane,M.,Moss,E。(即将到来的)“评估评估:比较算法影响评估和AI审核”,委托书籍的委托书章节:Webb,H。&Yaghmaei,E。(ed。),“ AI影响评估:方法与实践”,牛津大学出版社。Sloane,M.,Wüllhorst,E。(2025)。 “对欧洲,美国和加拿大AI监管的监管策略和透明度规定的系统审查”。 in:数据和政策(剑桥),doi:10.1017/dap.2024.54 Sloane,M。(2024)。 “考虑“社区””。 :科学技术问题,第XLI卷,第1卷,2024年秋季。 Harvey,E.,Sandhaus,H.,Jacbos,A.Z.,Moss,E.,Sloane,M。(2024)。 “机器中的尸体:运动捕获技术中的测量和验证的社会实践”。 2024 ACM CHI在计算系统中的人为因素会议,2024年5月,doi:https://dl.acm.org/doi/10.1145/3613904.3642004。 荣誉提及最佳纸张奖 * Koenecke,A.,Choi,A。S. G.,Mei,K。X.,Schellmann,H.,Sloane,M。(2024)。 在AI中“解决AI炒作”。Sloane,M.,Wüllhorst,E。(2025)。“对欧洲,美国和加拿大AI监管的监管策略和透明度规定的系统审查”。in:数据和政策(剑桥),doi:10.1017/dap.2024.54 Sloane,M。(2024)。“考虑“社区””。:科学技术问题,第XLI卷,第1卷,2024年秋季。Harvey,E.,Sandhaus,H.,Jacbos,A.Z.,Moss,E.,Sloane,M。(2024)。 “机器中的尸体:运动捕获技术中的测量和验证的社会实践”。 2024 ACM CHI在计算系统中的人为因素会议,2024年5月,doi:https://dl.acm.org/doi/10.1145/3613904.3642004。 荣誉提及最佳纸张奖 * Koenecke,A.,Choi,A。S. G.,Mei,K。X.,Schellmann,H.,Sloane,M。(2024)。 在AI中“解决AI炒作”。Harvey,E.,Sandhaus,H.,Jacbos,A.Z.,Moss,E.,Sloane,M。(2024)。“机器中的尸体:运动捕获技术中的测量和验证的社会实践”。2024 ACM CHI在计算系统中的人为因素会议,2024年5月,doi:https://dl.acm.org/doi/10.1145/3613904.3642004。荣誉提及最佳纸张奖 * Koenecke,A.,Choi,A。S. G.,Mei,K。X.,Schellmann,H.,Sloane,M。(2024)。在AI中“解决AI炒作”。'粗略耳语:言语到文本的幻觉会损害'。2024 ACM公平,问责制和透明度会议,2024年6月,D oi:https://doi.org/10.1145/3630106.3658996 Sloane,M.,Moss,Moss,Moss,E.,E。,Danks,D。(2024)。in:AI和道德,第4卷,第2期,2024年4月,doi:https://doi.org/10.1007/s43681-024-00481-- sloane,M。(2024)。“争议,矛盾和“参与”。in:大数据与社会,第11卷,第1卷,2024年2月,doi:https://doi.org/10.1177/20539517241235862。Sloane,M。(2023)。 “ Keith Wailoo的Colut Cool:Race,Markets and Innovation的粘性理论”。 在:历史和科学哲学研究,103,1-2,2023年11月,doi:https://doi.org/10.1016/j.shpsa.2023.10.003。 * Dinika,A.-A。和Sloane,M。(2023)。 “ AI和招聘和招聘中的不平等:现场扫描”。 在B. Berendt,M。Krzywdzinski和E. Kuznetsova(编辑。 ),魏森鲍姆会议论文集,2023年:Sloane,M。(2023)。“ Keith Wailoo的Colut Cool:Race,Markets and Innovation的粘性理论”。在:历史和科学哲学研究,103,1-2,2023年11月,doi:https://doi.org/10.1016/j.shpsa.2023.10.003。* Dinika,A.-A。和Sloane,M。(2023)。“ AI和招聘和招聘中的不平等:现场扫描”。在B. Berendt,M。Krzywdzinski和E. Kuznetsova(编辑。),魏森鲍姆会议论文集,2023年:
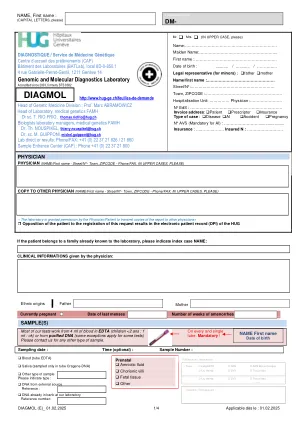
diagmol(e)_01.02.2025
常规检验α-肌血症(TPSAB1和TPSB2)淀粉样变性(家族性,TTR)AS,Angelman综合征NaApeceped(AIRE)Beckwith-Wiedemann(BWS)恶性。黑色素瘤(CDKN2A)NaEGFR突变(T790M等)在CtDNA上(仅在Streck Bct或Paxgene DNA管中)FG(Keller Clanslome,Med12)NaHblrg,Gilbert综合征(UGT1A1)naHblrg,她差异。胃癌(CDH1)Na na hed,低蛋白外胚性发育不良(EDA)HFE-HH,HERED。

旧骨头,新的前景
XXXII HF 8 26,26B,27 Bishop Hannes Finnsson(B.122-12Bl。160:sæbls。xxxiiÞó9 28,29 Thorunn olafsdottir Stephensen,F 22年P. 123-12Bl。 160:mbls。 165:H P. xxxiii oh 124:Óbls。 A.他们躺在xxxiv S-1 的先前骨架上 124:在BLS中。 Krónur7个孩子和两个XXXVII 31、32、33 XXXXIX 34、35、36 Bishop John Bishop John 124-12Bls。 161:看到。 Xlii FJ 6 38 Bishop Finn Jonsson(B. 126-12Bls。 161:b p。 165:头发:长度5 sm,颜色F(Lightwowl Haired),灰色蓝色Xliii Ggy 7 39,40 Gudrid Gisladottir,Finn的Joca的妻子59年。 127-12Bl。 161:mbls。 128:在BLS上。 XLV FJB 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。 161:儿童的骨头Inf1,可能是Inf.1a。 XLVI FJC 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。xxxiiÞó9 28,29 Thorunn olafsdottir Stephensen,F 22年P. 123-12Bl。 160:mbls。 165:H P. xxxiii oh 124:Óbls。 A.他们躺在xxxiv S-1 的先前骨架上 124:在BLS中。 Krónur7个孩子和两个XXXVII 31、32、33 XXXXIX 34、35、36 Bishop John Bishop John 124-12Bls。 161:看到。 Xlii FJ 6 38 Bishop Finn Jonsson(B. 126-12Bls。 161:b p。 165:头发:长度5 sm,颜色F(Lightwowl Haired),灰色蓝色Xliii Ggy 7 39,40 Gudrid Gisladottir,Finn的Joca的妻子59年。 127-12Bl。 161:mbls。 128:在BLS上。 XLV FJB 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。 161:儿童的骨头Inf1,可能是Inf.1a。 XLVI FJC 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。xxxiiÞó9 28,29 Thorunn olafsdottir Stephensen,F 22年P.123-12Bl。160:mbls。165:H P.xxxiii oh124:Óbls。A.他们躺在xxxiv S-1 的先前骨架上 124:在BLS中。 Krónur7个孩子和两个XXXVII 31、32、33 XXXXIX 34、35、36 Bishop John Bishop John 124-12Bls。 161:看到。 Xlii FJ 6 38 Bishop Finn Jonsson(B. 126-12Bls。 161:b p。 165:头发:长度5 sm,颜色F(Lightwowl Haired),灰色蓝色Xliii Ggy 7 39,40 Gudrid Gisladottir,Finn的Joca的妻子59年。 127-12Bl。 161:mbls。 128:在BLS上。 XLV FJB 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。 161:儿童的骨头Inf1,可能是Inf.1a。 XLVI FJC 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。A.他们躺在xxxiv S-1 的先前骨架上 124:在BLS中。 Krónur7个孩子和两个XXXVII 31、32、33 XXXXIX 34、35、36 Bishop John Bishop John 124-12Bls。 161:看到。 Xlii FJ 6 38 Bishop Finn Jonsson(B. 126-12Bls。 161:b p。 165:头发:长度5 sm,颜色F(Lightwowl Haired),灰色蓝色Xliii Ggy 7 39,40 Gudrid Gisladottir,Finn的Joca的妻子59年。 127-12Bl。 161:mbls。 128:在BLS上。 XLV FJB 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。 161:儿童的骨头Inf1,可能是Inf.1a。 XLVI FJC 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。A.他们躺在xxxiv S-1124:在BLS中。Krónur7个孩子和两个XXXVII 31、32、33 XXXXIX 34、35、36 Bishop John Bishop John 124-12Bls。 161:看到。 Xlii FJ 6 38 Bishop Finn Jonsson(B. 126-12Bls。 161:b p。 165:头发:长度5 sm,颜色F(Lightwowl Haired),灰色蓝色Xliii Ggy 7 39,40 Gudrid Gisladottir,Finn的Joca的妻子59年。 127-12Bl。 161:mbls。 128:在BLS上。 XLV FJB 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。 161:儿童的骨头Inf1,可能是Inf.1a。 XLVI FJC 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。Krónur7个孩子和两个XXXVII 31、32、33 XXXXIX 34、35、36 Bishop John Bishop John 124-12Bls。 161:看到。 Xlii FJ 6 38 Bishop Finn Jonsson(B. 126-12Bls。 161:b p。 165:头发:长度5 sm,颜色F(Lightwowl Haired),灰色蓝色Xliii Ggy 7 39,40 Gudrid Gisladottir,Finn的Joca的妻子59年。 127-12Bl。 161:mbls。 128:在BLS上。 XLV FJB 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。 161:儿童的骨头Inf1,可能是Inf.1a。 XLVI FJC 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。Krónur7个孩子和两个XXXVII 31、32、33 XXXXIX 34、35、36 Bishop John Bishop John124-12Bls。161:看到。Xlii FJ 6 38 Bishop Finn Jonsson(B. 126-12Bls。 161:b p。 165:头发:长度5 sm,颜色F(Lightwowl Haired),灰色蓝色Xliii Ggy 7 39,40 Gudrid Gisladottir,Finn的Joca的妻子59年。 127-12Bl。 161:mbls。 128:在BLS上。 XLV FJB 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。 161:儿童的骨头Inf1,可能是Inf.1a。 XLVI FJC 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。Xlii FJ 6 38 Bishop Finn Jonsson(B. 126-12Bls。 161:b p。 165:头发:长度5 sm,颜色F(Lightwowl Haired),灰色蓝色Xliii Ggy 7 39,40 Gudrid Gisladottir,Finn的Joca的妻子59年。 127-12Bl。 161:mbls。 128:在BLS上。 XLV FJB 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。 161:儿童的骨头Inf1,可能是Inf.1a。 XLVI FJC 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。Xlii FJ 6 38 Bishop Finn Jonsson(B.126-12Bls。161:b p。165:头发:长度5 sm,颜色F(Lightwowl Haired),灰色蓝色Xliii Ggy 7 39,40 Gudrid Gisladottir,Finn的Joca的妻子59年。127-12Bl。161:mbls。128:在BLS上。 XLV FJB 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。 161:儿童的骨头Inf1,可能是Inf.1a。 XLVI FJC 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。128:在BLS上。 XLV FJB 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。 161:儿童的骨头Inf1,可能是Inf.1a。 XLVI FJC 7青年。 一个年幼的孩子的不自然孙子。 128:在BLS上。128:在BLS上。XLV FJB 7青年。一个年幼的孩子的不自然孙子。128:在BLS上。161:儿童的骨头Inf1,可能是Inf.1a。XLVI FJC 7青年。一个年幼的孩子的不自然孙子。128:在BLS上。161:婴儿的微型,INF1,可能是Inf.1a。
空间社会结构的可视化 - Danny Dorling
I 曼德布洛特集无穷远处的两幅图像(彩色)。1 II 英国北部的土地使用特写(彩色)。2 III 10% 样本中十多人在各个选区之间的通勤流量。3 IV 1983-1987 年按价格、属性和销售变化的住房分布。4 V 1976 年所有地区之间的移民流动——按相邻顺序排序的流动。5 VI 1980/1981 年英格兰和威尔士选区之间的年度移民流动。6 VII 1971-1981 年英国年龄和性别分布的变化(彩色)。7 VIII 英国北部选举地图上的投票构成(彩色)。8 IX 英国南部选举地图上的投票构成(颜色)。9 X 行业、地位和性别的就业分布(颜色)。10 XI 计算机传统动画的静态图像(颜色)。11 XII 计算机光线追踪动画的静态图像(颜色)。12 XIII 曼德布洛特集和朱利亚集的光线追踪表面。13 XIV 可视化傅里叶变换——科学中的艺术(颜色)。14 XV 色彩迷宫——低分辨率图像可以显示的细节(颜色)。15 XVI 曼德布洛特集的可视化——放大和概括(颜色)。16 XVII 从泰恩赛德公路网出发的旅行时间(颜色)。17 XVIII 三种备选配色方案和键(颜色)。18 XIX 英国出生地集中度(颜色)。19 XX 伦敦人口、年龄、性别和子女分布(颜色)。20 XXI 伦敦出生地分布(颜色)。21 XXII 伦敦就业、职业和毕业生分布(颜色)。22 XXIII 英国各大工业集团分布,1987 年(颜色)。23 XXIV 各大工业集团分布变化,1984-87 年,增加(颜色)。24 XXV 1984-87 年各大工业集团分布变化,呈下降趋势(彩色)。25 XXVI 1984-1987 年各行业、地位和性别的就业变化(彩色)。26 XXVII 英国北部选举地图的政治摇摆(彩色)。27 XXVIII 英国南部选举地图的政治摇摆(彩色)。28 XXIX 英格兰和威尔士地方选举的投票分布(彩色)。29 XXX 英国土地使用情况(按 1km 方格划分)(彩色)。30 XXXI 欧洲二级地区 — 带注释的底图,按失业率着色。5831 XXXII 郡和苏格兰地区——带注释的底图,以失业率着色。32 XXXIII 家庭从业者委员会区域——带注释的底图,以失业率着色。33 XXXIV 地方教育当局——带注释的底图,以失业率着色。34 XXXV“功能性城市”——带注释的底图,以失业率着色。35 XXXVI 当地劳动力市场区域——带注释的底图,以失业率着色。36 XXXVII 通勤区域——带注释的底图,以失业率着色。37 XXXVIII 地方政府区——带注释的底图,以失业率着色。38 XXXIX 议会选区——带注释的底图,以失业率着色。39 XL 合并办公区——带注释的底图,以失业率着色。40 XLI 邮政编码区域——随机着色(颜色)。41 XLII 邮政编码区——随机着色(颜色)。42 XLIII 邮政编码区——随机着色(颜色)。43 XLIV 等土地面积投影的英国大陆铁路网络。44 XLV 等人口投影的英国大陆铁路网络。45 XLVI 等土地面积投影的英国主要公路网络。46 XLVII 等人口投影的英国主要公路网络。47 XLVIII 面积统计图实验(彩色)。48 XLIX 英国人口连续面积统计图(彩色)。49 L 县界显示保持选区连续性的桥梁。50 LI 各县人口统计图的演变。51 LII 县人口统计图,箭头表示拓扑结构。52 LIII 等面积投影上的地方当局区,已编入索引以便识别。53 LIV 地方当局区 — 按字母顺序排列的索引列表。54 LV 地方当局区统计图,已编入索引以便识别。55 LVI 等面积投影上的议会选区,已编入索引以便识别。56 LVII 议会选区 — 已编入索引,按字母顺序列出。57 LVIII 议会选区地图已编入索引,便于识别。