XiaoMi-AI文件搜索系统
World File Search Systemaccuracy

准确度、重复性和校准
机器人校准问题:准确性、可重复性和校准 Kevin L. Conrad、Panayiotis S. Shiakolas shiakolas@uta.edu、T. C. Yih 机械和航空航天工程。德克萨斯大学阿灵顿分校自动化与机器人研究所,美国德克萨斯州阿灵顿 76019,shiakolas@uta.edu 摘要。为关节式机器人手臂开发了使用接触式探头的接触校准方法的基础。该解决方案是在基于串行连杆机械手的运动机械设计的机器人当前校准和计量问题中提出的。探索了准确性、可重复性和分辨率,并采取了一种简单的方法。本练习旨在为探索在机器人手臂末端集成商业产品(如力传感器或触发式探头)的可行性奠定基础。确定候选流程和/或应用程序。研究结果表明,准确、可重复且经济高效的在线接触校准方法将是一种理想的解决方案。关键词。机器人精度、重复性、校准、分辨率 1 简介 机器人行业的主要技术障碍之一是减少工具框架和目标框架之间的误差。这种错误的来源很容易确定。控制器和机器人之间的建模差异是造成基座框架和工具框架之间大部分误差的原因。不准确的夹具和制造工艺可以解释工位框架和目标框架之间的差异。这些框架的定义如图所示。1 [1]。
精准无压力——维萨拉
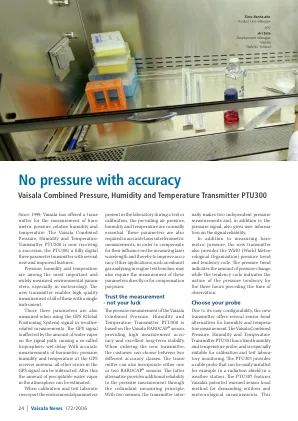
选择探头 由于易于配置,这款新型变送器提供了多种传感器头供湿度和温度测量选择。维萨拉组合压力、湿度和温度变送器 PTU301 具有固定湿度和温度探头,特别适用于校准和测试实验室监测。PTU303 提供电缆探头,可轻松安装在气象站的辐射屏蔽中。PTU307 采用维萨拉专利的加热传感器头方法,适用于要求严格的户外和气象测量。这


满足机载精度挑战...
成功的机载激光雷达测深仪的基本素质是精度、能力和成本效益。在过去的二十五年里,激光、光学、电子和计算机的发展使得构建具有不同用途的可行机载激光雷达系统变得更容易,而且正在构建的数量也在不断增加。然而,由于需求有限,而且仍然很难满足上述三个要求,尤其是第一个要求,目前世界上只有不到十台机载激光雷达测深仪。从系统中获取答案并不难。然而,要获得符合国际精度标准和典型客户操作要求的结果,需要大量的理解和努力。机载测深仪的设计、构造和操作的主要考虑因素必须是数据质量和深度测量精度。物理环境和系统硬件组件都会产生许多必须克服的错误源。这需要周到的硬件和软件系统设计和构建,以及预测、建模和应用适当的校正器。必须建立并遵循质量控制、校准和维护的操作程序。在本文中,我们描述了已开发的大量硬件设计功能、软件算法、偏差校正器、显示器和操作程序,为满足所需精度标准同时保持效率和成本效益的系统提供了基础。上述功能都已纳入美国陆军工程兵团 SHOALS 作战机载激光雷达测深系统。SHOALS 可通过直升机和固定翼飞机进行操作,以满足各种类型的测量要求,例如制图、疏浚、海岸工程、资源管理、建模和侦察。尽管 SHOALS 硬件是十年前设计的,但该设计已被证明是最佳的,经过七年的成功实地操作,涵盖了广泛的赞助商、要求、全球各地的位置和环境条件。SHOALS 飞行后数据处理软件套件提供了高精度、完美运行,并定期升级以提高实用性和效率。事实证明,整个系统设计非常灵活,并且根据客户要求在硬件和软件中添加了许多新特性和功能。在本文中,我们将描述硬件和软件设计理念以及关键的设计考虑因素。我们详细讨论了如何克服大量潜在或已实现的误差源,这些误差源通常存在于机载激光雷达水文系统中,特别是 SHOALS 中。
满足机载精度挑战...
成功的机载激光雷达测深仪的基本素质是精度、能力和成本效益。在过去的二十五年里,激光、光学、电子和计算机的发展使得构建具有不同用途的可行机载激光雷达系统变得更容易,而且正在构建的数量也在不断增加。然而,由于需求有限,而且仍然很难满足上述三个要求,尤其是第一个要求,目前世界上只有不到十台机载激光雷达测深仪。从系统中获取答案并不难。然而,要获得符合国际精度标准和典型客户操作要求的结果,需要大量的理解和努力。机载测深仪的设计、构造和操作的主要考虑因素必须是数据质量和深度测量精度。物理环境和系统硬件组件都会产生许多必须克服的错误源。这需要周到的硬件和软件系统设计和构建,以及预测、建模和应用适当的校正器。必须建立并遵循质量控制、校准和维护的操作程序。在本文中,我们描述了已开发的大量硬件设计功能、软件算法、偏差校正器、显示器和操作程序,为满足所需精度标准同时保持效率和成本效益的系统提供了基础。上述功能都已纳入美国陆军工程兵团 SHOALS 作战机载激光雷达测深系统。SHOALS 可通过直升机和固定翼飞机进行操作,以满足各种类型的测量要求,例如制图、疏浚、海岸工程、资源管理、建模和侦察。尽管 SHOALS 硬件是十年前设计的,但该设计已被证明是最佳的,经过七年的成功实地操作,涵盖了广泛的赞助商、要求、全球各地的位置和环境条件。SHOALS 飞行后数据处理软件套件提供了高精度、完美运行,并定期升级以提高实用性和效率。事实证明,整个系统设计非常灵活,并且根据客户要求在硬件和软件中添加了许多新特性和功能。在本文中,我们将描述硬件和软件设计理念以及关键的设计考虑因素。我们详细讨论了如何克服大量潜在或已实现的误差源,这些误差源通常存在于机载激光雷达水文系统中,特别是 SHOALS 中。
粉末衍射 II 中的精度
国际计划委员会,由 Rod Hill 担任主席,对于会议的顺利进行,我们感谢 Kathleen Kilmer 及其 NIST 会议办公室的工作人员,特别是 Tammie Grice 和 Lori Phillips。如果没有 Ray Young 和

5 级准确度和标准 - 加州交通部
5.1 简介 测量标准可以定义为满足特定目标所必需的最低精度。规范是实现所需精度的程序要求,证明测量结果不是偶然的,而是测量精度的指标。本文件提供了一种通用方法,用于报告位置由点表示的明确定义特征的水平和垂直坐标值的精度。示例包括主动测量标志,例如连续运行参考站 (CORS) 或 VLBI 1;被动测量标志,例如黄铜盘和杆标记;以及临时点,例如摄影测量控制点或施工桩。它提供了使用位置或比例方法来实现项目要求的等效方法。现代地理信息系统 (GIS) 允许我们存储更多可能重复的信息。用户越来越需要知道坐标值及其精度,以便用户可以决定哪些坐标值代表其应用的真实值的最佳估计。

温度是 SETSAW 精度的限制因素...
温度是限制 SETSAW 器件作为电流量子标准的精度的一个因素 Nick Fletcher、Jan-Theodoor Janssen 和 Tony Hartland NPL,英国米德尔塞克斯郡泰丁顿 1.摘要 我们测量了声电流平台 I n = nef 的斜率 (∆ I / ∆ V g ) n(n =1 和 2),作为浴温 T 在 0.3 至 4.2 K 范围内的函数。限制在一维通道中的电子“冲浪”频率为 f ≈ 2.8 GHz 的表面声波,该波由沉积在 GaAs 异质结构上的换能器产生。通道宽度由施加到同样沉积在异质结构上的肖特基栅极的电压 V g 控制。将归一化斜率 S = ( ∆ I / ∆ V g ) n /( ∆ I / ∆ V g ) n -1 → n 与使用 Flensburg 等人 [11] 提出的描述器件行为的模型计算出的斜率进行了比较。在这个模型中,S 与有效温度 T eff 相关,该温度可能大于 T 。测量表明,对于 n =1,T eff 的最小值为 1.65 ± 0.1 K,对应于最小值 S ≈ 10 -3 。2.简介 目前,国家计量机构正在进行大量研究工作,旨在开发基于单电子传输的电流量子标准。NPL 参与了两个这样的项目,一个使用单电子 R 泵(详见本摘要 [1] 中的其他内容),另一个基于本文的主题 SETSAW(表面声波单电子传输)技术。图 1 显示了 SETSAW 设备的示意图。该设备制造在半导体衬底(GaAs/Al x Ga 1-x As 异质结构)上,该衬底表面附近包含准二维电子气 (2DEG)。设备一端的叉指换能器 (IDT) 产生表面声波 (SAW),该表面声波传播通过形成 2DEG 收缩的中心区域。该行进机械波在压电 GaAs 材料中产生相应的电势,该电势与 2DEG 相互作用。在收缩区域(通常由沉积在表面上的金属分裂栅形成,相对于 2DEG 保持在负电位),SAW 电位的最小值可视为移动量子阱,其通过收缩通道传输电子。如果通道足够封闭,即上述量化电流的首次实现于 1996 年 [2] 报道。然而,尽管过去 5 年不断进行研究和开发 [例如“夹断” 使得正常传导被禁止,并且可以布置 SAW 的电位,使得每个电位最小值传输相同(少量)数量的电子,然后该设备用作电流源,产生电流 I=nef ,其中 n 是整数,e 是电子电荷,f 是 SAW 的频率。与使用通过金属-绝缘体-金属隧道结进行电子泵送相比,该技术的优势在于更高的工作频率 - 高达 5 GHz [3] 产生近 1 nA,而约 10 MHz 产生几个 pA。4,5,6],SETSAW 设备的量化精度仍然低于电子泵 [7]。本文介绍了一项实验的结果,该实验旨在测量 SETSAW 设备特性的温度依赖性,以期更好地理解(并希望控制)误差机制。

血清素,化学素霉素免疫测定的准确性
在这项研究中,根据CDC标准进行了早期临床活性原发性,继发性和潜在梅毒的诊断。在这项研究中,所有梅毒患者均被证实患有梅毒感染。如果患者表现出一个或多个无痛的堂,则进行原发性梅毒的诊断。患者被证实患有皮肤和粘膜病变,均在整个人体中,有或没有区域淋巴结肿大,并且可以被诊断为继发性梅毒。在具有这些临床标准的患者的非骨骼和三骨血清学检测的阳性结果可能是诊断初级和继发性梅毒的基础。在去年遇到以下标准之一的在去年初期感染的无症状患者被诊断出患有早期潜伏的梅毒:1)在过去的12个月中,已记录了血清转化或四倍的非骨骼测试滴定器的四倍; 2)去年与原发性或继发性梅毒一致的症状; 3)与被诊断为确认或可能的初级或继发性梅毒或可能的潜在梅毒的伴侣发生性接触(独立记录了不到一年);或4)在过去12个月中可能暴露后,对非股东和毛进行teponemal测试的阳性结果。 从2023年1月至11月,纳希丁·苏迪罗胡索多医院及其网络医院的性传播感染(STI)的个人被送往2023年1月至11月。。在去年初期感染的无症状患者被诊断出患有早期潜伏的梅毒:1)在过去的12个月中,已记录了血清转化或四倍的非骨骼测试滴定器的四倍; 2)去年与原发性或继发性梅毒一致的症状; 3)与被诊断为确认或可能的初级或继发性梅毒或可能的潜在梅毒的伴侣发生性接触(独立记录了不到一年);或4)在过去12个月中可能暴露后,对非股东和毛进行teponemal测试的阳性结果。从2023年1月至11月,纳希丁·苏迪罗胡索多医院及其网络医院的性传播感染(STI)的个人被送往2023年1月至11月。将招募所有愿意参加研究并符合纳入标准的人群,包括具有性传播感染风险的人,将被招募为样本。不同意参加这项研究的患者将被排除在外。