XiaoMi-AI文件搜索系统
World File Search Systemconfigurable

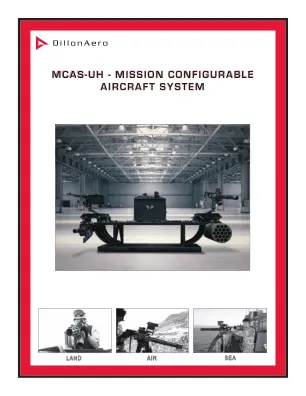
MCAS-UH - 任务可配置飞机系统
Dillon Aero 任务可配置飞机系统 (MCAS-UH) 提供多种配置,允许固定前方、舷外武器/存储位置和内部安装的机组人员操作武器的任意组合,而无需对飞机进行任何改装。内部和外部武器站都可以安装在横舱地板系统上,不使用时可以摆动到一边。M134D 枪系统可以容纳两个 3,000 或 4,000 发弹匣。

可配置、符合人体工程学的光学检测系统
超高清 (4K) 830 万像素摄像头,配备 30:1 电动变焦和自动对焦功能,可检查精细细节。550 毫米工作距离和 700 毫米视野,具有出色的光学性能,可用于检查大型物体。先进的远程控制台具有记忆预设和脚踏开关输出,可实现对摄像头和镜头的免提控制。支架柱上安装的 VESA 支架为操作员提供了符合人体工程学的位置,可一览无余地查看显示器。选件包括 XY 浮动板、数字视频/图像捕捉、防静电外壳和内置激光指示器。
在设计无人驾驶二次的可配置无人机自动驾驶仪
无人驾驶汽车(无人机)和四型人正在越来越多的应用中使用。通过纳入新的经济技术来不断改善森林火灾的检测和管理,以防止生态退化和灾难。使用内部圈循环设计,本文讨论了四个四面体的态度和高度控制器。作为高度非线性系统,可以通过假设几个假设来简化四项动力学。使用非线性反馈线性化技术,LQR,SMC,PD和PID控制器开发了四极管自动驾驶仪。通常,这些方法用于改善控制和拒绝干扰。pd-pID控制器还通过智能算法部署在烟雾或火灾的跟踪和监视中。在本文中,已经研究了使用具有可调参数的组合PD-PID控制器的效率。使用MATLAB Simulink通过模拟评估了性能。进行评估提出方法的计算研究表明,本文介绍的PD-PID组合产生了有希望的结果。

自适应机器人系统的可配置软件模型
在运行时在不同的系统配置之间切换。分别对所有这些不同但部分冗余的配置的分析是一个乏味,耗时且容易出错的任务,尤其是因为这忽略了配置之间的变化。在Päßler等人中。 [20],我们展示了建模这样的SAS作为系统家族的优势,在该系统中,每个家庭成员都对应于可能的配置,该配置允许基于家庭的建模和分析作为对抗冗余的手段[25]。 为此,我们使用了软件产品线(SPL)领域的正式模型和工具[2]。 We also used the fact that SASs can be implemented using a two-layered approach, decomposing the system into a managed and a managing subsystem [ 15 , 27 ], with the managed subsystem implementing the domain concerns (e.g., navigating a robot to a specific position) and the managing subsystem implementing the adaptation logic (e.g., reconfiguring due to changing environmental conditions). 这种关注点的分离由Profeat [9]迎合了基于概率的家庭模型检查的工具。 Profeat提供了一种手段,可以在一次运行中同时分析与有效配置相对应的模型家族。 本文为自适应机器人系统提供了可配置的软件模型,即用于搜索并遵循位于海床上的管道的自动水下车辆(AUV)。 该模型已用于案例研究,在Päßler等人中提出。 [20,21],并受到示例性的启发[22]。 与Päßler等人相反。在Päßler等人中。[20],我们展示了建模这样的SAS作为系统家族的优势,在该系统中,每个家庭成员都对应于可能的配置,该配置允许基于家庭的建模和分析作为对抗冗余的手段[25]。为此,我们使用了软件产品线(SPL)领域的正式模型和工具[2]。We also used the fact that SASs can be implemented using a two-layered approach, decomposing the system into a managed and a managing subsystem [ 15 , 27 ], with the managed subsystem implementing the domain concerns (e.g., navigating a robot to a specific position) and the managing subsystem implementing the adaptation logic (e.g., reconfiguring due to changing environmental conditions).这种关注点的分离由Profeat [9]迎合了基于概率的家庭模型检查的工具。Profeat提供了一种手段,可以在一次运行中同时分析与有效配置相对应的模型家族。本文为自适应机器人系统提供了可配置的软件模型,即用于搜索并遵循位于海床上的管道的自动水下车辆(AUV)。该模型已用于案例研究,在Päßler等人中提出。[20,21],并受到示例性的启发[22]。与Päßler等人相反。此外,本文说明了如何对这种模式进行细化的分析,以及如何修改和扩展模型。获得一些安全保证并为系统运营商提供估计任务持续时间或AUV能源消耗的手段。[20],本文未详细介绍软件模型。相反,它通过软件模型显示了如何将基于家庭的系统建模和分析的现有框架用于SAS研究。此外,它显示了如何扩展软件模型以进一步,可能更复杂的SAS模型和分析。
可配置的 AI 模型:低代码、高影响
类别/标签 为了确定我们模型的类别,我们分析了来自旅行帮助台的大量真实数据。我们观察到两个主要趋势:用户要么请求有关即将到来的旅行的帮助,例如预订航班或重新安排旅行细节,要么请求有关旅行政策的信息。除了这两个有关电子邮件发件人意图的大类之外,还添加了相关主题作为标签:航班、酒店和其他。我们还将垃圾邮件确定为一个关键类别,定义为与员工旅行无关的任何未经请求的电子邮件。我们希望将此类别纳入我们的模型,以评估其在检测每个电子邮件收件箱中常见的不需要的广告和网络钓鱼计划方面的有效性。
NREL OpenPATH:一个开源、可配置的旅行行为数据收集平台
NREL OpenPATH 使社区和项目能够收集全面的多式联运旅行日记,深入了解旅行方式的选择和模式,并尝试各种选项来支持与当地相关的可持续出行目标。为了评估实际案例,可以将跟踪配置为仅记录配备蓝牙低功耗信标的车辆的行程。

具有最优云资源分配的可配置业务流程形式化模型
摘要:在当今竞争激烈的商业环境中,组织越来越需要对灵活且经济高效的业务流程进行建模和部署。在这种情况下,可配置流程模型用于通过以通用方式表示流程变体来提供灵活性。因此,类似变体的行为被分组到包含可配置元素的单个模型中。然后根据特定需求定制和配置这些元素。但是,配置元素的决策可能不正确,从而导致严重的行为错误。最近,流程配置已扩展到包括云资源分配,以通过允许访问按需 IT 资源来满足业务可扩展性的需求。在这项工作中,我们提出了一个基于命题可满足性公式的形式化模型,允许找到正确的元素配置,包括资源分配配置。此外,我们建议根据云资源成本选择最佳配置。这种方法可以为设计人员提供正确且经济高效的配置决策。

pygraft:触手可及的合成模式和知识图的可配置生成
摘要。知识图(kgs)已成为突出的数据表示和管理范式。通常受到架构(例如,本体论)的基础,KGS不仅捕获了事实信息,而且捕获了上下文知识。在某些任务中,一些公斤将自己确立为标准基准。但是,最近的工作概述依靠有限的数据集集合不足以评估方法的概括能力。在一些数据敏感领域(例如教育或医学)中,对公共数据集的访问更加有限。为了纠正上述问题,我们释放了Pygraft,这是一种基于Python的工具,生成了高度定制的域 - 不可能的模式和KGS。合成的模式包含各种RDF和OWL构建体,而合成的KG则模仿了真实世界KGS的字符和规模。最终通过运行描述逻辑(dl)追求来确保生成资源的逻辑一致性。通过提供单个管道中同时产生模式和kg的方式,Pygraft的目的是赋予在基于图形的机器学习(ML)或更一般的KG处理等领域的基准新颖方法中生成更多样化的kgs。在基于图的ML中,这应该促进对模型性能和概括能力的更全面评估,从而超越了可用基准的有限收集。Pygraft可在以下网址提供:https://github.com/nicolas-hbt/pygraft。