XiaoMi-AI文件搜索系统
World File Search Systemconfigured

样本个人住宿计划过程
您要加载的文档需要Adobe Reader 8或更高版本。您可能没有安装Adobe读取器,或者您的查看环境可能无法正确配置以使用Adobe读取器。有关如何安装Adobe读取器并配置查看环境的信息,请访问http://www.adobe.com/go/pdf_forms_configure。

DA 表格 5305
您尝试加载的文档需要 Adobe Reader 8 或更高版本。您可能未安装 Adobe Reader,或者您的查看环境可能未正确配置为使用 Adobe Reader。有关如何安装 Adobe Reader 和配置查看环境的信息,请参阅 http://www.adobe.com/go/pdf_forms_configure。
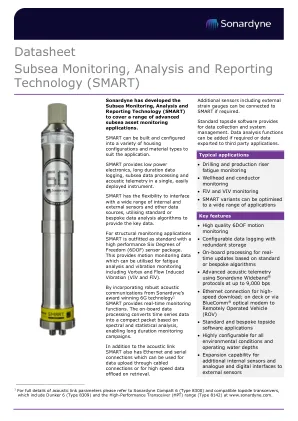
海底监测,分析和报告技术(...
上表显示了配置用于钻孔疲劳监视的智能应答器的典型值。作为灵活的仪表平台,如果需要更高的灵敏度,则可以使用替代配置,包括替代运动传感器。SMART可以使用标准数据处理算法,用于疲劳监视,也可以根据要求纳入客户特定要求。

AnaWin 用户指南 - Watlow
系统要求 ................................................................................1-1 硬件要求 ................................................................................1-1 软件要求 ................................................................................1-1 零件清单 ................................................................................1-2 系统框图 ................................................................................1-2 安全性 ......................................................................................1-2 安装 ......................................................................................1-3 系统设置 ................................................................................1-3 将控制器设置为 ModBus 协议 .............................................1-4 配置控制器 ......................................................................1-4 通道分组 .............................................................................1-6 其他配置选项 ......................................................................1-7 监控配置的控制器 .............................................................1-10
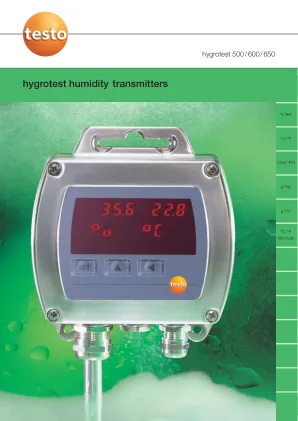
hygrotest 湿度变送器 - Master Tools
所有湿度测试装置均根据客户规格配置。请从以下选项中选择符合您要求的解决方案,例如,带电缆探头的湿度测试 600、标准电缆长度(2 米)、标准探头长度(210 毫米)、特氟隆过滤器、H5 显示器、-30..+50 °Ctd(露点)作为通道 1 输出和 -20...120 °C 作为通道 2 输出。

澳大利亚人摆脱了网格电池存储的网格和边缘
灵活的《卫报》系列是一个“插头和播放”预装电池系统,考虑到符合AS5139安装要求和清洁能源委员会的“最佳实践指南”的牢记的太阳能安装程序。它支持一系列逆变器/充电器平台,可以为“ AC耦合”和“ DC耦合”太阳能安装配置,使其成为极其灵活的平台。

自动水下车辆的控制系统的设计Edysys1
摘要。本文描述了自动水下车辆的控制系统的设计Edysys1。与远程操作的车辆(ROV)相比,一辆无人驾驶的水下车辆是一种无人驾驶的且自行的水下船只,可以独立运行,并执行几项分配给它的任务,该任务通常被束缚在船上或其他系泊的水车上。自主水下车辆的控制系统的智能设计是一个积极的研究领域,赋予对自治的需求和智能系统满足此类需求的能力。一个控制系统是用Raspberry Pi 4计算机设计为主控制单元的。通过车辆采集数据采集的各种子系统和传感器由Raspberry Pi 4控制,该覆盆子PI 4具有配置的机器人操作系统(ROS)。使用Python编程语言配置控制每个传感器的必要智能。此后,相关的python脚本在ROS框架中作为节点实现。通过调用ROS中的相关节点,通过ROS环境中的设计系统获得了各种感觉数据值。还实现了通过洛拉的成功沟通。

ecosubm-power+ auv -planet-ocean.co.uk
ecosubm-power+是一个仅重17公斤的人便携式AUV。可以配置一系列有效载荷,通常用于部署侧面扫描声纳,相机和DVL,但也可以携带一系列的科学传感器来收集有用的海洋学数据。作为具有边缘计算能力的低成本平台,它非常适合大规模部署,以快速收集大量数据。
用于会合和捕获的 GN&C 和传感器
由于美国导弹防御局和其他国防组织投入了数十亿美元,过去二十年来,相关技术不断发展 - 基础技术现已成熟且模块化:推进器、电子设备、传感器、制导、控制、导航 (GN&C) 和跟踪软件 - 这些技术可以随时调整和配置,用于航天器维修、行星、月球、小行星的会合和着陆任务...
QUANTUM F 系列参考架构
下图说明了使用 Quantum F 系列存储的三种部署方案:光纤通道 (FC) 环境、全以太网环境以及混合 FC 和以太网环境。请注意,虽然 F 系列可以部署在混合环境中,但每个 F 系列系统在工厂都配置为基于以太网或基于 FC 的系统。基于 FC 的系统上的以太网接口仅用于管理,无法访问块存储。