XiaoMi-AI文件搜索系统
World File Search Systemded
CGHC 共付额青铜 $0 专项 / $2250 Rx 专项 - - 覆盖范围 ...
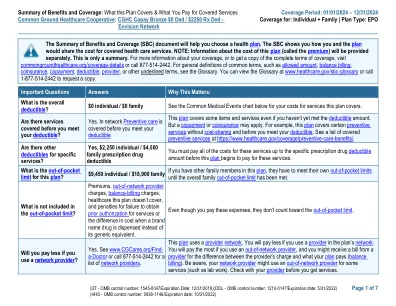
您的申诉和上诉权利:如果您对您的计划因索赔被拒而提出投诉,有些机构可以为您提供帮助。这种投诉称为申诉或上诉。有关您的权利的更多信息,请查看您将因该医疗索赔而获得的福利说明。您的计划文件还提供了有关如何向您的计划提交索赔、上诉或任何理由的申诉的完整信息。有关您的权利、本通知或援助的更多信息,请联系:Common Ground Healthcare Cooperative 上诉和申诉部门,邮政信箱 1630,Brookfield,WI 53008-1630 或致电 877-514-2442。如需威斯康星州的帮助,请联系保险专员办公室投诉部,地址:PO Box 7873, Madison, WI 53707-7873,电子邮件:complaints@ociwi.state.us,电话:800-236-8517 或 608-266-0103。


LASERTEC 3000 DED 混合型
金属粉末被逐层涂抹在基材上,并通过激光熔合在一起,不会产生任何孔隙或裂纹。同轴保护气体可防止堆积过程中发生氧化。高强度熔合接头与基材形成,冷却后即可进行加工。
DED 经济影响分析概述
REMI 特点: 它使用相对大量的区域数据根据区域条件进行校准,从而提高性能,尤其是在结构性经济变化的条件下。 它结合了几种分析模型(包括投入产出、一般均衡、经济地理和计量经济模型),使其能够利用每种特定方法的优势并弥补其弱点。 它允许用户对未来几年的任意组合进行预测,使用户在分析经济影响的时间方面具有特殊的灵活性。 它考虑了供需变动产生的价格、工资率、移民模式、劳动力参与等变化。 它被大量研究人员在各种条件下使用,并且已被证明具有可接受的性能。

DED型激光增材制造技术...
陶瓷具有较高的强度和模量、优异的耐磨性和耐化学性,特别是优异的耐热性1,2),主要应用于在高温下严重摩擦或高应力负荷等极端环境下使用的部件,可应用于燃气轮机、发动机、电池、热交换器等需要高工作温度的航空航天、汽车、能源领域的结构和部件3,4),将陶瓷应用于这些应用可通过提高工作温度和减少系统损耗来提高效率5)。烧结是一种传统的陶瓷制造方法,其按以下顺序进行:1)粉末制备(造粒),2)压缩成型,3)坯体加工,4)烧结,5)后退火和精加工等(图1)。粉末制备是指通过添加添加剂来造粒以促进致密化的过程。

维修使用DED添加剂制造
直接能源沉积(DED)过程是添加剂制造(AM)过程,为制造业提供了新的观点。尤其是组件维修区域可以从这些过程中受益匪浅。因此,有必要确保DED流程的能力,以便维修的组件可以提供相同的服务水平。本文侧重于基于粉末的LMD AM修复TI-6AL-4V零件,并研究其准确性,可重复性和可靠性。首先,已经开展了一项实验运动,以评估原材料的特征。最佳过程参数选择是通过孔隙度和宏观结构分析进行的。拉伸特性,低周期疲劳和裂纹繁殖研究已在原来的样品(100%AM)和界面样品(50%AM / 50%底物)上进行。结果与锻造合金和验证LMD相关性与生产良好的零件相比。在第二部分中,本文提出了TI-6AL-4V组件的半自动修复方法:从3D扫描操作中确定了要修复的缺陷几何形状和零件的CAD模型。调整的加法和加工工具路径。

3000 DED 混合动力第二代 - DMG MORI
用于结构构建。 *2 带 38 把刀具的刀具库 *3 AM 头处于垂直位置(B 轴 90 ° ) *4 选项 *5 可能的形状因工件和头部的角度而异。 *6 IEC 60825-1 是 1 级安全标准,描述了即使长时间直接进行光束观察以及使用光学仪器(放大镜或双筒望远镜)进行观察也能安全使用。 ※ DMG MORI CO., LTD.、DMG MORI、CELOS、compactMASTER、zero-sludge 和 zeroFOG 是其注册商标或商标

PBF(粉末床熔合)和DED(定向能量...
混合增材制造 (AM) 是指两种金属 AM 技术的组合:粉末床熔合 (PBF) 材料沉积和定向能量沉积 (DED) 附加构建。本研究重点研究了混合 AM 生产过程中 PBF 和 DED 相对沉积方向的不同特性。将混合 AM 制备的样品(即混合样品)的特性与 PBF 或 DED 制备的样品的特性进行了比较。PBF 沉积物的微观结构以铁素体为主,局部可观察到非常细小的残余奥氏体。相反,DED 沉积物的微观结构中均匀形成板条马氏体和残余奥氏体。两种过程中微观结构的不同归因于冷却速度的差异。在 DED 沉积物中,由于残余奥氏体分数高,显微硬度显著降低。然而,在混合样品中,由于长期沉积的时效热处理,HAZ 中的显微硬度迅速增加。 PBF和DED样品的主要磨损机制分别是氧化磨损和塑性变形。

将 DED 修复流程仿真并集成到机床控制环境中
模拟 DED 修复过程 EnginSoft 的作用是开发合适的模拟方法和配置,以虚拟复制 DED 修复应用过程,为新潜在客户铺平道路。模拟 DED 修复过程的模型基于 Ansys Additive Suite,可以预测和优化修复过程对参考部件的影响。Ansys DED 模拟模块导入扫描的基线几何图形和外部生成的 G 代码。与用例相关的主要材料和工艺配置被输入到模拟参数中。沉积过程及其热机械变形的最终模拟是在两个主要用例上开发和测试的,其中包括根据实际测量结果进行验证。

使用人工神经网络预测 DED 制造过程中的热场
AAbstr bstract act.. 在过去十年中,机器学习越来越吸引多个科学领域的研究人员,特别是在增材制造领域。同时,这项技术对许多研究人员来说仍然是一种黑箱技术。事实上,它允许获得新的见解,以克服传统方法(例如有限元方法)的局限性,并考虑制造过程中发生的多物理复杂现象。这项工作提出了一项全面的研究,用于实施机器学习技术(人工神经网络),以预测 316L 不锈钢和碳化钨直接能量沉积过程中的热场演变。该框架由有限元热模型和神经网络组成。还研究了隐藏层数和每层节点数的影响。结果表明,基于 3 或 4 个隐藏层和整流线性单元作为激活函数的架构可以获得高保真度预测,准确率超过 99%。还强调了所选架构对模型准确性和 CPU 使用率的影响。所提出的框架可用于预测模拟多层沉积时的热场。