XiaoMi-AI文件搜索系统
World File Search SystemmW
�2ämw'9“* #d«
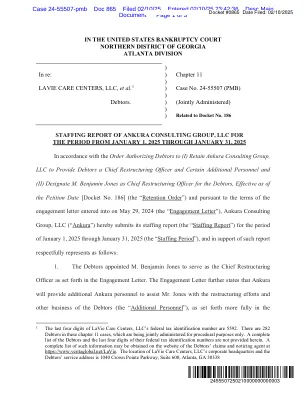
IRS关于有争议的索赔。Rohid Ahmed董事总经理 - 管理第11章案件的管理,管理和报告要求。- 管理现金和流动性管理活动,包括协助准备和维护债务人现金流的预测和差异分析。- 与破产有关的工作文件进行尽职调查和准备。- 管理尽职调查和与供应商,UCC财务顾问和其他利益相关者的沟通。- 管理每月操作报告的准备。- 监督索赔分析和审查,包括分析索赔支持和与债务人记录的对帐。- 支持首席重组官在与
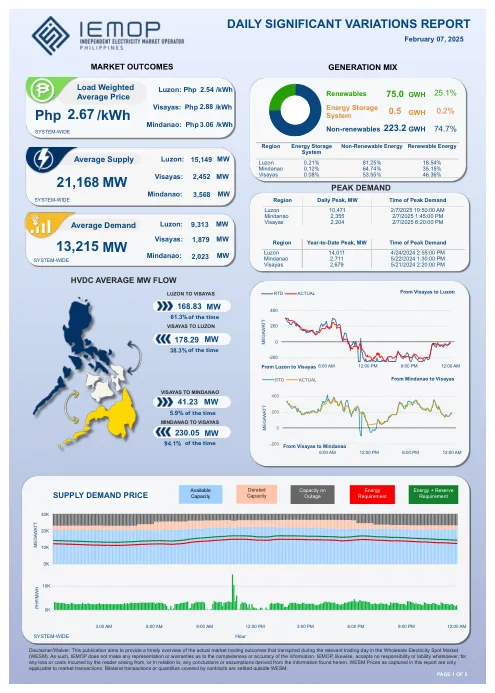
2.67 菲律宾比索/千瓦时 21168 兆瓦 13215 兆瓦
免责声明/豁免:本出版物旨在及时概述批发电力现货市场 (WESM) 相关交易日内发生的实际市场交易结果。因此,IEMOP 不对信息的完整性或准确性做出任何陈述或保证。同样,对于读者因本文信息得出的任何结论或假设而产生的或与之相关的任何损失或费用,IEMOP 不承担任何责任或义务。本报告中的 WESM 价格仅适用于市场交易。双边交易或合同涵盖的数量在 WESM 之外结算。
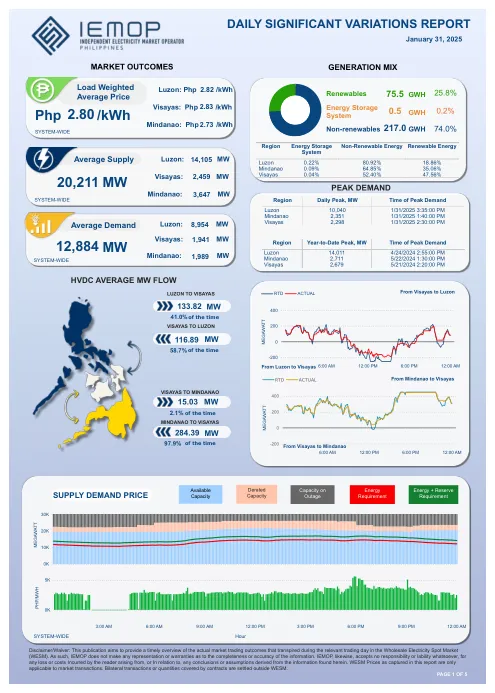
2.80 菲律宾比索/千瓦时 20211 兆瓦 12884 兆瓦
免责声明/豁免:本出版物旨在及时概述批发电力现货市场 (WESM) 相关交易日内发生的实际市场交易结果。因此,IEMOP 不对信息的完整性或准确性做出任何陈述或保证。同样,对于读者因本文信息得出的任何结论或假设而产生的或与之相关的任何损失或费用,IEMOP 不承担任何责任或义务。本报告中的 WESM 价格仅适用于市场交易。双边交易或合同涵盖的数量在 WESM 之外结算。
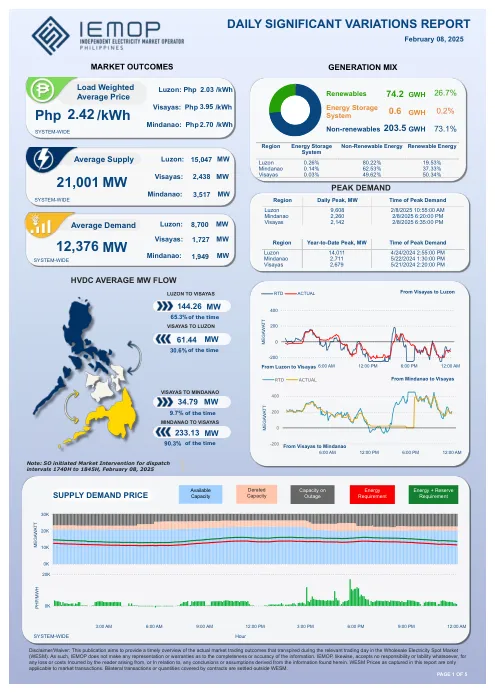
2.42 php /kWh 21001 MW 12376 MW < /div>
免责声明/豁免:本出版物旨在及时概述在批发电力现货市场(WESM)中相关交易日(WESM)中发生的实际市场交易成果。因此,IEMOP对信息的完整性或准确性没有任何陈述或保证。iemop也不承担任何责任或不稳定,因为读者或与此处发现的信息得出的任何结论或假设所产生的任何损失或费用。本报告中捕获的WESM价格仅适用于市场交易。合同涵盖的双边交易或数量在WESM之外定居。

2.84 菲律宾比索/千瓦时 20942 兆瓦 13116 兆瓦
免责声明/豁免:本出版物旨在及时概述批发电力现货市场 (WESM) 相关交易日内发生的实际市场交易结果。因此,IEMOP 不对信息的完整性或准确性做出任何陈述或保证。同样,对于读者因本文信息得出的任何结论或假设而产生的或与之相关的任何损失或费用,IEMOP 不承担任何责任或义务。本报告中的 WESM 价格仅适用于市场交易。双边交易或合同涵盖的数量在 WESM 之外结算。
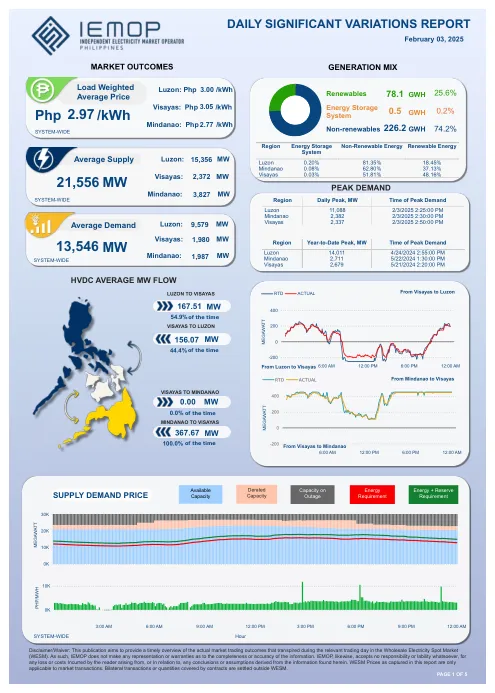
2.97 菲律宾比索/千瓦时 21556 兆瓦 13546 兆瓦
免责声明/豁免:本出版物旨在及时概述批发电力现货市场 (WESM) 相关交易日内发生的实际市场交易结果。因此,IEMOP 不对信息的完整性或准确性做出任何陈述或保证。同样,对于读者因本文信息得出的任何结论或假设而产生的或与之相关的任何损失或费用,IEMOP 不承担任何责任或义务。本报告中的 WESM 价格仅适用于市场交易。双边交易或合同涵盖的数量在 WESM 之外结算。

3.63 菲律宾比索/千瓦时 18903 兆瓦 12092 兆瓦
免责声明/豁免:本出版物旨在及时概述批发电力现货市场 (WESM) 相关交易日内发生的实际市场交易结果。因此,IEMOP 不对信息的完整性或准确性做出任何陈述或保证。同样,对于读者因本文信息得出的任何结论或假设而产生的或与之相关的任何损失或费用,IEMOP 不承担任何责任或义务。本报告中的 WESM 价格仅适用于市场交易。双边交易或合同涵盖的数量在 WESM 之外结算。
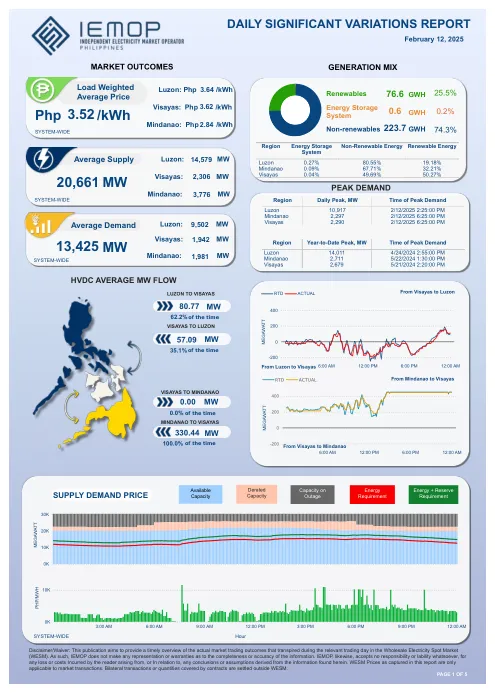
3.52 php /kWh 20661 MW 13425 MW < /div>
免责声明/豁免:本出版物旨在及时概述在批发电力现货市场(WESM)中相关交易日(WESM)中发生的实际市场交易成果。因此,IEMOP对信息的完整性或准确性没有任何陈述或保证。iemop也不承担任何责任或不稳定,因为读者或与此处发现的信息得出的任何结论或假设所产生的任何损失或费用。本报告中捕获的WESM价格仅适用于市场交易。合同涵盖的双边交易或数量在WESM之外定居。