XiaoMi-AI文件搜索系统
World File Search Systemnematic

引用本文:S. Lederer、D. Jost、T. Böhm、R. Hackl、E. Berg 和 SA Kivelson (2020) 测量量子材料的虚时间动力学
摘要 理论分析通常涉及虚时相关函数。根据这些信息推断实时动态响应函数非常困难。然而,正如我们在此所述,从测量的(实时)响应函数的频率依赖性计算虚时相关器非常简单。除了便于理论与实验之间的比较之外,所提出的方法还可用于从复杂数据集中提取(长时间弛豫)动力学的某些方面。我们通过对铁基超导体 Ba(Fe 1 − x Co x ) 2 As 2 的拉曼散射光谱推断出的向列响应的分析来说明这一点,其中包括一种用于识别该响应的假定量子临界贡献的新方法。

活性 skyrmion 的光学富集和引导动力学
摘要:光提供了一种控制材料物理行为的强大手段,但很少用于为活性物质系统提供动力和引导。我们展示了对被称为“skyrmion”的液晶拓扑孤子的光学控制,这种孤子是最近出现的可高度重构的无生命活性粒子,能够表现出诸如群居之类的突发集体行为。由于手性向列液晶具有扭曲的自然倾向,并且对电场和光反应灵敏,因此它可作为动态控制 skyrmion 和其他活性粒子的试验台。利用环境强度的非结构化光,我们展示了由振荡电场驱动并由光诱导障碍物和图案照明引导的大规模多面重构和集体 skyrmion 运动的解除。
具有边界惩罚的扰动dirichlet能量的最小化器的对称性
摘要。我们考虑域ω的s 2值图r n最小化了dirichlet能量的扰动,并在ω和水平惩罚上对∂Ω进行垂直惩罚。我们首先显示了使用庞加莱型不平等的物理参数在特定范围内的普遍常数配置的全球最小值。然后,我们证明任何能量最小化器将其值都带入球体s 2的固定半梅里德人,并将最小化器的唯一性推断为适当的对称组的作用。我们还证明了具有不同惩罚的最小化器的比较原则。最后,我们将这些结果应用于球上的问题,并显示最小化器的径向对称性和单调性。在尺寸n = 2中,我们的结果可以应用于列纤维液体中的列液晶和微磁能的Oseen-Frank能量。
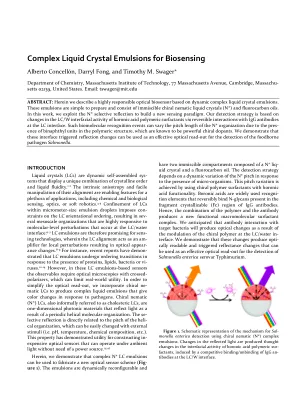
生物传感的复杂液晶乳液
摘要:在本文中,我们描述了一种基于动态复杂液晶乳液的高度负责的光学生物传感器。这些乳液的准备很容易,并且由不混溶的手性列液晶(N*)和碳碳油组成。在这项工作中,我们利用N*选择性反射来构建新的感应范式。我们的检测策略是基于通过与LC界面处的IgG抗体可逆相互作用通过可逆相互作用的硼酸聚合物表面活性剂的LC/W界面活性的变化。由于聚合物结构中的双phaphthyl单位的支撑,这种生物分子识别事件可能会改变N*组织的音高长度,该聚合物结构已知是强大的手性掺杂剂。我们证明,这些触发的反射变化可以用作检测食源性病原体沙门氏菌的有效光学读数。
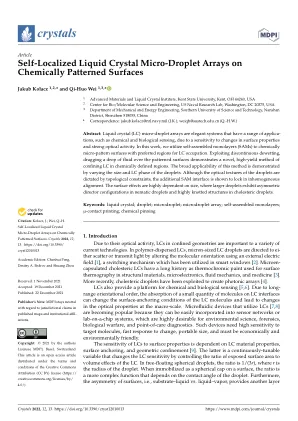
化学图案化表面上的自定位液晶微液滴阵列
摘要:液晶 (LC) 微液滴阵列是一种精巧的系统,由于其对表面性质变化的敏感性和强光学活性,具有广泛的应用,例如化学和生物传感。在这项工作中,我们利用自组装单层 (SAM) 对表面进行化学微图案化,并优先选择液晶占据的区域。利用不连续脱湿,将一滴液体拖到图案化表面上,展示了一种新颖、高产的方法,可将液晶限制在化学定义的区域中。通过改变液滴的大小和液晶相,证明了该方法的广泛适用性。虽然液滴的光学纹理由拓扑约束决定,但额外的 SAM 界面显示出锁定非均匀排列。表面效应高度依赖于尺寸,其中较大的液滴在向列相液滴中表现出不对称的指向矢结构,而在胆甾相液滴中表现出高度打结的结构。
等离子淀粉样式触形 - 研究收集
类型的人造功能材料用于水纯化,生物传感,光电塔克斯甚至抗病毒过滤。[7-10]人造物质中淀粉样蛋白原纤维的潜力可以通过形成各向异性组件的能力进一步富集。与许多其他类似棒状的胶体颗粒一样,淀粉样蛋白原纤维的水悬浮液可以自组装成具有远距离定向排序的相位,即由熵驱动的液晶(LCS)。[11-14]除了没有位置排序的常见列表外,原纤维的固有手性还导致纤维化相位,并通过控制原纤维的长度分布和限制,并通过控制原纤维的螺旋扭曲对齐。[15,16]这些有序的状态导致中曲科中原纤维组件的机械,流变和光学性质各向异性,但是,在官能材料的制造中,尚未充分利用这一充分的优势。[7,8]

曲面上的主动线虫动力学
人们对活性物质的集体行为产生浓厚兴趣的驱动力是理解天然材料物理的目的。一类研究较为深入的活性物质,包括上皮细胞、细长细菌和活细胞内的丝状颗粒,可以通过棒状颗粒的相互作用来描述。这将这些系统与向列液晶联系起来,这些颗粒之间具有长程取向顺序。调整这些理论并通过活性成分对其进行扩展,产生了“活性向列相”的概念,详情见[7]。活性作用使系统失去平衡,导致拓扑缺陷的自发产生/湮灭、长程向列相序的破坏和活性湍流的形成。如果将此类系统限制在曲面上,拓扑约束将强烈影响新出现的时空模式。利用这些拓扑结构,可以实现对向列相液晶的精确控制。
![arxiv:2305.18087v5 [cond-mat.str-el] 2024年4月4日](/simg/3\327710e8ec841807767a35405eab2f5e72f69bf3.webp)
arxiv:2305.18087v5 [cond-mat.str-el] 2024年4月4日
要了解电荷密度波(CDW)阶段内基于V的Kagome金属中的多阶段过渡,我们专注于“混合型”费米表面的影响,因为它在CDW状态下在“纯型” Fermi表面上完好无损。在混合型费米表面,中等自旋相关性上发展,我们揭示了均匀(q = 0)键顺序是由paramagnon干扰机制引起的,这是由Aslamazov-larkin顶点校正描述的。主要的解决方案是E 2 G-对称性命名秩序,其中可以任意旋转主管。另外,我们获得了A 1 g式对称顺序,该顺序导致晶格常数的变化而没有对称性破裂。可以通过弹性测量值观察到q = 0处的预测的E 2 g和1 g通道的流动。这些结果可用于了解2×2 CDW相内的多阶段过渡。目前的理论具有一般性的意义,因为各种Kagome晶格系统中存在混合型费米表面(带有多边形货车爱好奇异性)。
Ruobing Bai
1. Z. Wei、R. Bai,“光活性液晶弹性体的温度调节光机械驱动”。极端力学快报,2022 年。2. R. Bai、E. Ocegueda、K. Bhattacharya,“光活性半结晶聚合物中的光化学诱导相变”。物理评论 E,2021 年。3. M. Hua、C. Kim、Y. Du、D. Wu、R. Bai、X. He,“摇摆凝胶:基于动态屈曲的化学机械自振”。物质,2021 年。4. R. Bai、YS Teh、K. Bhattacharya,“固态光反应动力学和平衡中的集体行为”。 Extreme Mechanics Letters,2021 年。5. R. Bai、K. Bhattacharya,“光活性向列弹性体中的光机械耦合”。固体力学与物理学杂志,2020 年。6. J. Yang、J. Steck、R. Bai、Z. Suo,“拓扑粘附 II。可拉伸粘附”。Extreme Mechanics Letters,2020 年。
![b'magic-角角扭曲的双层石墨烯可容纳各种有趣的物质状态,包括非常规的超导状态。但是,这种材料可以构成全新的物质状态吗?在这次演讲中,我将讨论两种不同类型的电子冷凝物的可能出现,它们超出了BCS耦合范式。这些是由费米子四晶体形成的冷凝物,在电子对之间没有相干性,而是对之间的一对。通过在魔术角扭曲的低能有效模型上使用大型蒙特卡洛模拟[1]用于魔法扭曲的双层石墨烯,我们表明,取决于超导基态,费米昂四倍体置换率可能是遗传阶段。打破时间逆转对称性的四个电子通常出现在超导过渡上方[2]。相反,如果基态是列源超导体,我们的数值模拟表明,该系统在正常金属相中熔化之前表现出电荷4E相[3]。这表明扭曲的双层石墨烯是稳定和观察这些新型量子状态的理想平台。](/simg/6\6d3cf3ed101c36f703d3ff583b37daeb7ee69d78.webp)
b'magic-角角扭曲的双层石墨烯可容纳各种有趣的物质状态,包括非常规的超导状态。但是,这种材料可以构成全新的物质状态吗?在这次演讲中,我将讨论两种不同类型的电子冷凝物的可能出现,它们超出了BCS耦合范式。这些是由费米子四晶体形成的冷凝物,在电子对之间没有相干性,而是对之间的一对。通过在魔术角扭曲的低能有效模型上使用大型蒙特卡洛模拟[1]用于魔法扭曲的双层石墨烯,我们表明,取决于超导基态,费米昂四倍体置换率可能是遗传阶段。打破时间逆转对称性的四个电子通常出现在超导过渡上方[2]。相反,如果基态是列源超导体,我们的数值模拟表明,该系统在正常金属相中熔化之前表现出电荷4E相[3]。这表明扭曲的双层石墨烯是稳定和观察这些新型量子状态的理想平台。
b'magic-角角扭曲的双层石墨烯可容纳各种有趣的物质状态,包括非常规的超导状态。但是,这种材料可以形成全新的物质状态吗?在本次演讲中,我将讨论两种不同类型的电子冷凝物的可能出现,它们超出了BCS耦合范式。这些是由典型的四元素形成的冷凝物,在电子对之间没有相干性,而是对成对对之间的相干性。通过使用大型蒙特卡洛模拟在魔术角扭曲的低能有效模型[1]中,我们表明,取决于超导地面状态,费米式四倍体置置供应量可以作为遗传相吻合。由四个破坏时间逆转对称性的电子形成,通常出现在超导过渡上方[2]。相反,如果基态是列明超导体,则我们的数值模拟表明,该系统在正常金属相中熔化之前表现出电荷4E相[3]。这表明扭曲的双层石墨烯是稳定和观察这些新型量子状态的理想平台。