XiaoMi-AI文件搜索系统
World File Search Systempts
pts:CSE 2025
Number System, HCF and LCM, Mathematical Operations, Problems on Ages, Average, Arithmetic, Geometric and Harmonic Progression Series, Principles of Equation, Permutation & Combination, Probability, Venn and Network Diagram Statistics, Time and Distance, Area & Perimeter, Boats & Races, Pipes & Cisterns, Data Interpretation, Percentage, Simple & Compound Interest, Profit & Loss, Ratio, Proportion, Mixture &伙伴关系,时间和工作,管道和水箱,数量和表面积,日历和时钟,套装理论,几何和月经,坐标几何和三角学
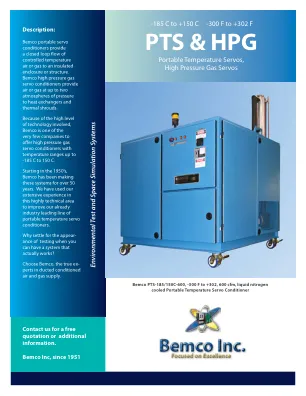
PTS 和 HPG - Bemco Inc.
PTS2MN- V 200 2000 670 @ -25 C 5 @ -25 C -35 至 +150 单级 1 空气或 GN 2 PTS2MF- V 200 2000 780 @ -60 C 5 @ -60 C -70 至 +150 级联 1 x 1 空气或 GN 2 PTS5MN- V 500 4000 1680 @ -25 C 5 @ -25 C -35 至 +150 单级 3 空气或 GN 2 PTS5MF- V 500 4000 1960 @ -60 C 5 @ -60 C -70 至 +150 级联 3 x 3 空气或 GN 2 PTS10MN- V 1000 6000 3360 @ -25 C 5 @ -25 C -35 至+150 单级 5 空气或 GN 2 PTS10MF- V 1000 6000 3910 @ -60 C 5 @ -60 C -70 至 +150 级联 5 x 5 空气或 GN 2 PTS15MN- V 1500 9000 5040 @ -25 C 5 @ -25 C -35 至 +150 单级 10 空气或 GN 2 PTS15MF- V 1500 9000 6160 @ -60 C 5 @ -60 C -70 至 +150 级联 10 x 10 空气或 GN 2
![HTRF少数结合。套件-10k pts
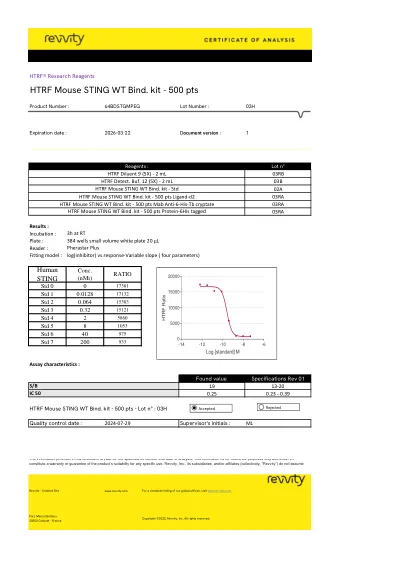
HTRF鼠标刺激wt结合。套件-500 pts
l-3,5,3' - [125 I] -triioodothyine [i] -t3
使用现象细胞绘画和多机械染色试剂盒的表型歧视。
确保敏感的宿主细胞污染物检测
DNA使用Omni Bead Ruptor 12珠磨机均质器从大麻sativa中提取DNA,以进行样品制备。
充满信心地创建自己的荧光素酶细胞系。
针点定制GRNA设计工具
从新的角度看您的研究。
体外转录指南(IVT)和DSRNA检测的重要性
使用化学技术推动精度肿瘤学。](/simg/0\0c26db813ac8255cbdbccbd02747bde95861dfd7.webp)
HTRF少数结合。套件-10k pts HTRF鼠标刺激wt结合。套件-500 pts l-3,5,3' - [125 I] -triioodothyine [i] -t3 使用现象细胞绘画和多机械染色试剂盒的表型歧视。 确保敏感的宿主细胞污染物检测 DNA使用Omni Bead Ruptor 12珠磨机均质器从大麻sativa中提取DNA,以进行样品制备。 充满信心地创建自己的荧光素酶细胞系。 针点定制GRNA设计工具 从新的角度看您的研究。 体外转录指南(IVT)和DSRNA检测的重要性 使用化学技术推动精度肿瘤学。
本文档中提供的信息对于指定的批号和分析日期有效。此信息仅用于参考目的,不构成产品适用于任何特定用途的保证或保证。Revvity,Inc。,其子公司和/或分支机构(统称为“ REVVITY”)对使用本文档或本文所述的产品造成的任何错误或损害均不承担任何责任。REVVITY明确否认所有保证,包括对特定目的的适销性或适用性的保证,无论口头还是书面,明示或暗示,据称是由于任何贸易或任何交易的用法而引起的,与此处包含的信息或产品本身有关。
PTS 迈向国际标准的路线图
• 没有包含国际标准目标的 Renstra。 • 学习项目/大学认证状态仍为 B • 国际合作网络仍然不够完善。 • 所采用的课程仍然面向当前。 • 讲师的出版物尚未达到国际标准。
MLC 风冷式冷水机组 MLC-FC 自然冷却... - PTS Media
MPC 和 MPC-fC 1/2-50 吨一体式风冷或水冷式冷水机组,适用于工业冷却、医疗冷却或定制 HVAC 应用。包括集成微处理器、泵站和储水箱。
PTS 延期薪酬退休计划员工信息手册
上述问题和答案概括了 PTS 计划的要点。建议您查看夏威夷修订法规第 88F 章、夏威夷行政法规第 14-56 章至第 14-61 章(可在以下地点查看:夏威夷州立图书馆夏威夷和太平洋分馆,地址:478 South King Street, Honolulu, 96813;卡胡卢伊公共图书馆,地址:90 School Street, Kahului, 96732;希洛公共图书馆,地址:300 Waianuenue Avenue, Hilo 96720;利胡埃公共图书馆,地址:4344 Hardy Street, Lihue, 96766)以及董事会的“计划文件”(重印在以下页面),以获得 PTS 计划的完整最新概述,因为法规、行政法规和计划文件可能会不时修订。以上规定如有冲突,则优先顺序为:法规、行政规章、计划文件、问答录。

问题集2问题1(PRG是OWFS)10分...
其中k←{0,1} n被随机选择。换句话说,没有PPT对手可以区分访问Oracle ENC 0(k,·,·),当给出时,当以输入为两个消息m 0时,m1∈{0,1}ℓ(n)总是加密m 0 vs. oracle encacle ence enc 1(k,·,·)总是加密始终加密eNcrypts m 1 1。对手A可以根据需要将Oracle称为多次。在讲义中https://www.ccs.neu.edu/home/wichs/class/crypto-fall17/lecture7。pdf我们给出了定义的略有不同的变体,在该定义中,我们定义了一个称为b = 0、1的cpagame b的交互式游戏,并要求这两个游戏是无法区分的。表明这两个定义是等效的,这意味着任何满足一个方案也必须满足另一个方案。

sspd Restore-l PTS Progress AIAA Prop 2020
国家航空航天管理局(NASA)的勘探和空间服务(NEXIS)戈达德太空飞行中心部门一直在开发技术1(OSAM-1)1(OSAM-1)的技术,以机器人为机器人加油和新卫星在Onorbit上加油。OSAM-1,以前称为Restore-L,成功地通过了一个重要的NASA里程碑,称为关键决策Point-C(KDP-C),并获得了代理商级别的实施批准。决策点还建立了任务的官方时间表和预算。OSAM-1航天器,维修有效载荷和空间基础设施灵巧机器人(蜘蛛)有效载荷将在太空中加油,组装通信天线并制造光束。通过展示这些功能,该任务正在推进从未经过测试的技术,以在未来的任务中使用(由NASA以及其他政府组织和私营企业)。该任务由NASA太空技术任务局内的技术演示任务计划资助。

在Polarix研究中,患者(PTS)的循环肿瘤DNA(CTDNA)状态和临床结局(PTS)(PTS)(pts)
AFH: Consulting or advisory roles (Bristol-Myers Squibb, Seattle Genetics, Merck, Genentech, Inc./ F. Hoffmann-La Roche Ltd, AstraZeneca/Medimmune, ADC Therapeutics, Takeda, AstraZeneca/Medimmune, Karyopharm, ADC, Regeneron, Genmab, Tubulis GmbH, Pfizer, Adicet Bio,Caribou Biosciences,Abbvie);旅行,住宿,费用(Bristol-Myers Squibb);研究资金(Bristol-Myers Squibb,Merck,Genentech,Inc./f。Hoffmann-La Roche AG,风筝,Gilead Company,Astrazeneca,Seattle Genetics,Gilead Sciences,ADC); ST:就业(Genentech,Inc。);领导力(F. Hoffmann-La Roche); LHS: Consulting or advisory role (Celgene, AbbVie, Seattle Genetics, TG Therapeutics, Janssen, Amgen, F. Hoffmann-La Roche/Genentech, Inc., Gilead Sciences, Lundbeck, Amgen, Apobiologix, Karyopharm Therapeutics, Kite, a Gilead Company, Merck, Takeda, Teva, TG Therapeutics,阿斯利康(Astrazeneca),Acerta Pharma,Morphosys,Incyte,Debiopharm群,Sandoz-Novartis,Genmab,Verastem); Honoraria(Amgen,Apobiologix,Abbvie,Celgene,Gilead Sciences,Janssen-Ortho,Karyopharm Therapeutics,Lundbeck,Merck,F。Hoffmann-La Roche La Roche Ltd/Genentech Ltd/Genentech Ltd/Genentech,Inc. Debiopharm群,Sandoz-Novartis,Verastem,Genmab);研究资金(F. Hoffmann- La Roche Ltd/Genentech,Inc。,Teva); FJ:咨询或咨询角色(F. Hoffmann-La Roche Ltd); Honoraria(F. Hoffmann-La Roche Ltd,Celgene,Janssen,Abbvie/Genentech,Inc。); GL:咨询或咨询角色(Genentech,Inc./f。Hoffmann-La Roche Ltd, Janssen-Cilag, Bristol-Myers Squibb, Novartis, MorphoSys, AstraZeneca, Gilead Sciences, Genmab/Seattle Genetics, Incyte, ADC Therapeutics, AbbVie, Genase, Immagene, Hexal, Lilly, Sobi, PentixaPharm, Miltenyi Biomedicine, Karyopharm Therapeutics);旅行,住宿,费用(Janssen-Cilag,Genentech,Inc./f。Hoffmann-La Roche Ltd,Abbvie,Gilead Sciences);专家证词(F. Hoffmann-La Roche Ltd); Honoraria(Janssen-Cilag,F。Hoffmann-La Roche Ltd/Genentech,Inc。),Astrazeneca,Bristol-Myers-Myers Squibb,Gilead Sciences,Novartis,Abbvie,Genmab/Genmab/Seattle Genetics,Constellation Genetics,Constellation Pharmaceuticals,adc Therapeuticals,adc Therapeutics,Incyte,Incyte,Sobi),Sobi);研究资金(Janssen-Cilag,F。Hoffmann-La Roche Ltd/Genentech,Inc。,Astrazeneca,Aquinox,Aquinox,Aquinox,Bayer,Gilead Sciences,Morphosys,Morphosys,Verastem,Verastem,Agios); MT:咨询或咨询角色(Takeda,Bristol-Myers Squibb,Incyte,Abbvie,Amgn,F。Hoffmann-La Roche Ltd,Gilead Sciences,Janssen,Morphosys,Morphosys,Novartis);旅行,住宿,费用(Gilead Sciences,Takeda,Bristol-Myers Squibb,F。Hoffmann-La Roche Ltd,Janssen,Abbvie); Honoraria(Janssen,Gilead Sciences,Takeda,Bristol-Myers Squibb,Amgen,Abbvie,F。Hoffmann-La Roche Ltd,Morphosys,Morphosys,Novartis); GS:咨询或咨询角色
HTRF少数结合。套件-10k pts
本文档中提供的信息对于指定的批号和分析日期有效。此信息仅用于参考目的,不构成产品适用于任何特定用途的保证或保证。Revvity,Inc。,其子公司和/或分支机构(统称为“ Revvity”)不假定