XiaoMi-AI文件搜索系统
World File Search Systemtb
TB 20 三位一体
成就 1911 年 10 月 10 日,Leon MORANE 和 Raymond SAULNIER 私人成立了 MORANE SAULNIER 公司,这就是如今 SOCATA 的前身。他们从不起眼的起点出发,驾驶 Bleriot 飞机打破了 100 公里/小时的大关,获得了 108 公里/小时的世界速度记录,创造了新的世界速度记录。 1912 年,MORANE SAULNIER 引入了单翼机,改变了航空历史。与当时业界最喜欢的双翼机相比,这种设计性能更佳,成本效益更高。1913 年,罗兰加洛斯首次驾驶 MORANE H 型飞机飞越地中海,耗时 7 小时 53 分钟。 1914 年 4 月,Raymond SAULNIER 申请了机枪螺旋桨发射系统的专利,第一架战斗机由此诞生。历史上第一个战斗机中队装备了 MORANE-SAULNIER 飞机。1930 年,MS 230 被编入法国空军。1935 年,MS 406 成为第一架配备滑动和可释放座舱盖的飞机。1941 年,MORANE-SAULNIER 的设计办公室迁至法国塔布。在取代了之前的租户 Dewoitine 公司后,SOCATA 工厂的根基就此奠定。1949 年,MS 733 ALCYON 下线,开启了持续 30 多年的传奇。1953 年 1 月,它演变为双引擎飞机 MS 755 FLEURET。到 1954 年,设计发展成为 MS 760 PARIS,这是世界上第一架四座喷气式飞机。巴黎号也成为第一架喷气式飞机



消除结核病的人工智能解决方案
在这个框架中,问题定义的清晰度并不总是意味着对解决问题所需的数据量的定量理解,或者某个指标应采用的数值以产生影响。通常,在完成初始模型实验并获得一些实地经验之前,这些都是未知的。如果某个数值对影响至关重要,则应在问题定义中提供该值的理由。例如,在通过自动 X 射线分析检测结核病的情况下,人工智能应该瞄准的准确度阈值可以基于人类专家(放射科医生)准确度的现有指标。因此,人工智能技术应该尝试达到或超过这个准确度。另一方面,在预测依从性的情况下,相关的准确度指标及其数值可能不太清楚,因为可能不存在相应的手动基线。在这种情况下,只有在建立人工智能模型和评估实地干预措施的一些实验之后才能获得清晰度。

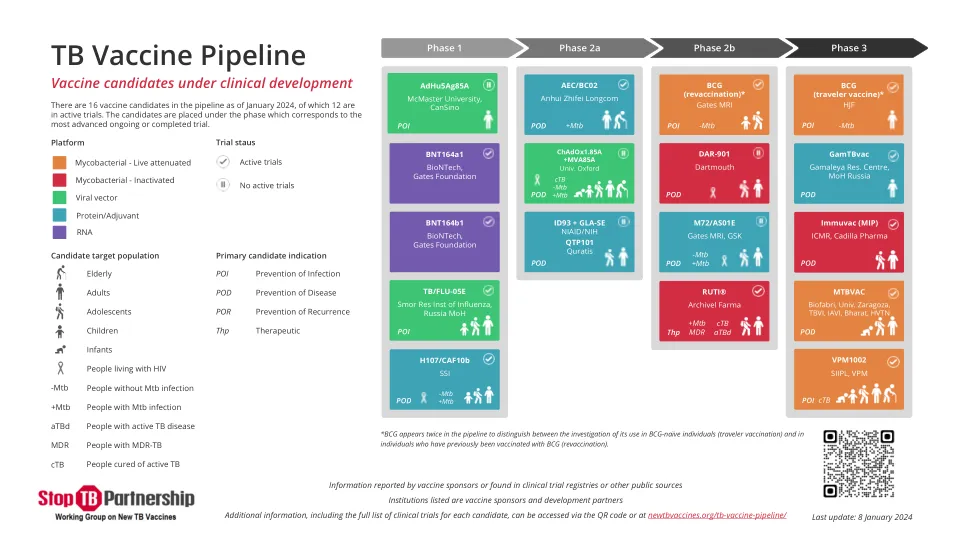
结核病疫苗促进委员会
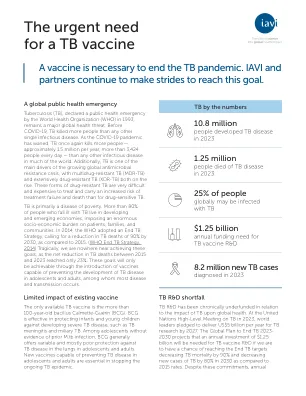
d 结核病是一种可预防和治愈的传染病,是全球传染病死亡的主要原因之一。从 2000 年到 2023 年,结核病治疗和结核病-艾滋病毒合并感染的抗逆转录病毒疗法挽救了 7900 万人的生命。然而,COVID-19 大流行,加上不公平的卫生服务、冲突、气候变化和自然灾害,严重阻碍了抗击结核病的进展。2023 年,全球估计有 1080 万人患结核病,其中 55% 为男性,33% 为女性,12% 为 15 岁以下儿童。这比 2022 年略有增加,主要是由于人口增长。2023 年全球结核病相关死亡人数减少至 125 万,其中艾滋病毒阴性者为 109 万,艾滋病毒感染者为 16.1 万。这一下降延续了 2022 年出现的积极趋势,此前两年,即 2020 年和 2021 年 COVID-19 疫情最严重时期,结核病发病率曾出现增长。从地理分布来看,2023 年患结核病的大多数人分布在世卫组织的非洲区域(24%)、东南亚区域(45%)和西太平洋区域(17%),东地中海区域(8.6%)、美洲区域(3.2%)和欧洲区域(2.1%)的比例较小。在 2023 年所有结核病病例中,6.1% 为艾滋病毒感染者。世卫组织非洲区域国家新发结核病患者中同时感染艾滋病毒的比例最高,在南部非洲部分地区超过 50%。欧洲结核病患者中患利福平耐药或耐多药结核病的比例最高。
结核病 MEL 计划模板
每个接受美国国际开发署结核病资金的项目(即使该资金在综合项目中只占相对较小的数额)都必须纳入 PBMEF 指标,以证明其对结核病指标的贡献。为证明结核病资金的合理性,合作伙伴应考虑整个基本指标清单,并选择与监测计划的结核病活动相关的所有指标;这应包括尽可能多的核心指标。有关使用临时 PBMEF 指标汇编、选择结核病指标以及决定哪些指标有助于衡量活动对预期结核病结果的贡献以及哪些指标可以衡量归因的帮助,请参阅 PBMEF 指南。有关如何选择绩效指标的帮助,请参阅美国国际开发署的 TIPS:选择绩效指标。