XiaoMi-AI文件搜索系统
World File Search Systemwalk
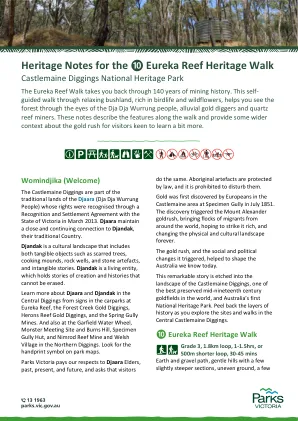
❿ 尤里卡礁遗产步行之旅遗产说明
如需紧急援助,请拨打 000 或使用手机拨打 112 以访问任何可用网络。尤里卡礁位于中北部消防区。丛林火灾安全是个人责任。在丛林火灾季节进入公园和森林的任何人都需要注意天气预报。在 emergency.vic.gov.au、VicEmergency 智能手机应用程序上查看火灾危险等级和全面禁火日,或拨打 VicEmergency 热线 1800 226 226。在灾难性火灾危险等级日,本公园将为公共安全而关闭。请勿进入公园。在 parks.vic.gov.au 或拨打 13 1963 查看最新情况。
如何策划步行上学日活动
步行上学日活动形式多样,规模各异。无论是从小处着手,还是从大处着手,关键在于找到适合您社区的活动。过去 10 年,4,500 个城市的 17,500 多所学校举办了 31,000 次步行上学日活动。这些活动的目的各异,有的严肃,有的有趣,例如促进体育锻炼、引起对安全需求的关注、建立邻里意识和激发学校精神。研究表明,步行上学可以对学业成绩、学生早晨的精力水平和注意力、逃学和旷课产生积极影响,并且可以通过社会联系和社区建设改善学校及其社区。在北卡罗来纳州,人们对步行和骑自行车上学的兴趣日益浓厚,步行上学日的参与人数也在不断增加。
非厄米物理的非幺正量子行走方法
[1] K. Mochizuki, D. Kim, 和 H. Obuse, Phys. Rev. A 93 , 062116 (2016)。[2] L. Xiao, X. Zhan, ZH Bian, KK Wang, X. Zhang, XP Wang, J.Li, K. Mochizuki, D. Kim, N. Kawakami,Y. Wi, H. Obuse, B. Sanders, P. Xue, Nature Phys. 13 , 1117 (2017)。[3] L. Xiao, X. Qin, K. Wang, Z. Bian, X. Zhan, H. Obuse, B.Sanders, W. Yi, P. Xue, Phys. Rev. A 98 , 063847 (2018)。[4] K. Mochizuki, D. Kim, N. Kawakami, 和 H. Obuse, Phys. Rev. A, 102 , 062202 (2020)。[5] M. Kawasaki、K. Mochizuki、N. Kawakami 和 H. Obuse, Prog. Theor. Exp. Phys. 2020 , 12A105 (2020)。[6] N. Hatano 和 H. Obuse, Annals of Physics 435, 168615 (2021)。[7] T. Bessho、K. Mochizuki、H. Obuse 和 M. Sato, Phys. Rev. B 105 , 094306 (2022)。[8] R. Okamoto、N. Kawakami 和 H. Obuse(准备中)。

量子行走搜索的统一框架——DROPS
我们提出了一种新的量子行走搜索框架,统一并加强了这些框架,从而产生了许多新成果。例如,新框架可以在电网设置中有效地找到标记元素。新框架还允许在命中时间框架(最小化行走步数)和 MNRS 框架(最小化检查元素是否被标记的次数)之间进行插值。这使得资源之间能够实现更自然的权衡。除了量子行走和相位估计之外,我们的新算法还使用了量子快进,类似于 Ambainis 等人的最新结果。这种观点还使我们能够推导出量子行走算法更一般的复杂性界限,例如基于相应经典行走的蒙特卡罗类型界限。最后,我们展示了如何在某些情况下避免使用相位估计和量子快进,回答了 Ambainis 等人的一个悬而未决的问题。


学习走路:通过...
摘要 - 在性能和能量限制下的腿部机器人运动的在线学习仍然是一个挑战。的方法,例如随机梯度,深度增强学习(RL),已经针对双子,四倍和六脚架进行了探索。这些技术在计算密集程度上,因此很难在边缘计算平台上实施。这些方法在能源消耗和吞吐量方面也是不足的,因为它们依赖复杂的传感器和数据预处理。另一方面,神经形态范围(例如尖峰神经网络(SNN))在边缘智能上的低功率计算中变得越来越有利。snn表现出具有突触的仿生峰值时间依赖性可塑性(STDP)的强化学习机制的能力。但是,尚未探索训练腿部机器人以中央模式发生器(CPG)在SNN框架中生成的同步步态模式行走。这种方法可以将SNN的效率与基于CPG的系统的同步运动相结合 - 提供了移动机器人技术中端到端学习的突破性绩效。在本文中,我们提出了一种基于增强的随机学习技术,用于培训刺激CPG的六型固醇机器人,该机器人学会了在没有先验知识的情况下使用生物风格的三脚架步态行走。整个系统是在具有集成传感器的轻质Raspberry Pi平台上实现的。我们的方法在有限的边缘计算资源中为在线学习打开了新的机会。

ORISE 学生游戏:Orbie 的太空行走
2.LS1.1 使用证据和观察来解释许多动物以不同的方式使用它们的身体部位和感官来观察、听到、抓住物体、保护自己、从一个地方移动到另一个地方以及寻找、找到和摄入食物、水和空气。2.LS1.2 获取和传达信息,根据动物的身体特征对它们进行分类(脊椎动物哺乳动物、鸟类、两栖动物、爬行动物、鱼类、无脊椎动物-昆虫)。2.LS1.3 使用简单的图形表示来显示物种具有独特和多样化的生命周期 2.LS2.1 开发和使用模型来比较动物如何依赖周围环境和其他生物来满足它们在居住地的需求。2.LS2.2 预测当环境变化(温度、砍伐树木、野火、污染、盐度、干旱、土地保护)时动物会发生什么。2.LS3.1 使用证据解释生物具有从父母遗传下来的身体特征,并且这些特征的变化存在于相似生物群体中。
2024 ASAP/SHARP 5K 彩色步行/跑步
我,.................................[您的全名],在此声明,据我所知,此注册表中提供的所有信息均真实准确。我理解参加体育锻炼和健身活动具有固有风险,我自愿承担所有此类风险。我承认 ASAP / SHARP 及其工作人员对跑步期间可能发生的任何伤害或事故概不负责。

单量子离散时间量子步行的计算能力
量子步行已被视为通用量子计算的原始。通过使用描述单个粒子离散时间量子步行所需的操作,我们证明了在两个Qubit System上实现通用门的实现。这个想法是要收获单个量子位的有效希尔伯特空间及其在位置空间叠加中演变的位置空间,以实现多Qubit的状态和量子门上的通用量子集。与基于电路的计算模型相比,在拟议的量子步行模型中,以工程任意状态形式实现了许多非平凡的门。我们还将讨论模型的可扩展性和一些命题,以实现较大的量子系统中使用较少数量的Qubits。

动量空间中连续时间量子行走的量子搜索
硬币赋予的自由度,如 [3, 9] 所述。这与所谓的离散时间 QW 形成对比,在离散时间 QW 中,额外的硬币自由度会定期翻转 [3]。我们特意保留这种命名法,以便与 QW 社区建立联系。这也是合理的,因为周期性驱动的 Floquet 问题 [10] 的物理实现仍然会随时间不断演变,例如参见下面等式 (1) 中的 QKR 哈密顿量。我们现在利用 AOKR 实验的多功能性来实现基于这种 CTQW 的量子搜索协议。但我们的主要目标不是提高高度专业的计算机科学算法的性能,而是提出一种方法,通过该方法可以使用玻色-爱因斯坦凝聚态 (BEC) 的标准实验在由 BEC 形成的一维离散动量态网格基组内进行简单的量子搜索。该基础由周期性势能定义,该势能以双光子反冲为单位,以离散步骤改变 BEC 的动量。本文结构如下:第 2 部分,在简要介绍量子共振条件下 AOKR 的时间演化之后,我们介绍了适用于我们实验系统的搜索协议。因此,我们提出了两种不同的技术,以通过测量特定演化后的动量分布来获得所需状态。在第 3 部分,我们讨论了搜索协议的时间缩放,最后对用于搜索的 CTQW 的实现的重复性和命中时间进行了一般性评论。第 4 部分总结了本文。