XiaoMi-AI文件搜索系统
World File Search System两者之间

简要介绍通信卫星自适应再利用财务可行性研究和自适应再利用案例研究,以支持克拉克斯堡门户部门计划。
摘要 作为克拉克斯堡门户区计划流程的一部分,蒙哥马利规划局委托 HR&A Advisors, Inc.(一家全国性房地产、经济发展和公共政策咨询公司)评估 COMSAT 地产的三种房地产开发方案的可行性,其中包括建筑物的适应性再利用和额外土地上的新开发。该研究以两份附件报告的形式提供,包括其他地方类似项目的案例研究和财务可行性分析。这项工作的目标是帮助规划人员了解不同开发方案的潜在土地价值创造、支持 COMSAT 建筑物适应性再利用所需的投资水平以及两者之间的潜在权衡。

制造和分析来自...
生物塑料的水分含量是指生产过程后的生物塑料的质量百分比。随着使用增塑剂的使用而增加了水分含量。来自图3,为合成的最大甘油添加最大甘油的生物塑料的水分含量最高(49%),并且添加氯仿百分比最高的生物塑料具有最低的水分含量(30%)。当两者之间的比率为1:1时,中间的水分含量位于中间。先前的研究中,香蕉皮被用于制作基于淀粉的生物聚合物(4)表明,基于甘油的生物塑料具有较高的水分含量值。这是因为甘油是羟基的一部分,该羟基很容易与水分子形成氢键,并且对它们具有很大的亲和力。
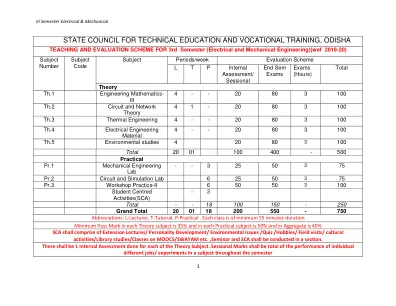
第三电气提纲
SL No. 主题周期01热力学概念和术语12 02热力学定律12 03完美气体的特性过程10 04内燃烧发动机08 05空气标准周期10 06燃料和燃烧08总计60 D.课程内容:课程内容:1。 热力学概念和术语1.1。 热力学系统(封闭,开放,孤立)1.2。 系统的热力学特性(压力,体积,温度,熵,焓,内部能量和测量单位)。 1.3。 密集而广泛的属性1.4。 定义热力学过程,路径,循环,状态,路径函数,点功能。 1.5。 热力学平衡。 1.6。 准静态过程。 1.7。 能量及其来源的概念解释1.8。 两者之间的工作,热量和比较。 1.9。 机械等效的热量。 1.10。 工作转移,位移工作2。 热力学定律SL No.主题周期01热力学概念和术语12 02热力学定律12 03完美气体的特性过程10 04内燃烧发动机08 05空气标准周期10 06燃料和燃烧08总计60 D.课程内容:课程内容:1。热力学概念和术语1.1。热力学系统(封闭,开放,孤立)1.2。系统的热力学特性(压力,体积,温度,熵,焓,内部能量和测量单位)。1.3。密集而广泛的属性1.4。定义热力学过程,路径,循环,状态,路径函数,点功能。1.5。热力学平衡。1.6。准静态过程。1.7。能量及其来源的概念解释1.8。两者之间的工作,热量和比较。1.9。机械等效的热量。1.10。工作转移,位移工作2。热力学定律
POWYS绿色基础设施评估
本背景文件已准备好支持Powys替换本地发展计划(LDP)2022-2037的发展。本文的目的是审查上下文和可用证据,并对Powys进行绿色基础设施评估。这项绿色基础设施评估(GIA)是替代生物质疑的支持文件。绿色基础设施及其产出将在实现替代的LDP的结果中发挥重要作用,从房屋建设到主动的旅行注意事项以及介于两者之间的所有空间。它也将构成首选策略的关键部分。以下各节总结了相关的国家,区域和地方政策环境,在制定替换的开展商党时,需要考虑并考虑到,并提出建议,以支持开发中的绿色基础设施。
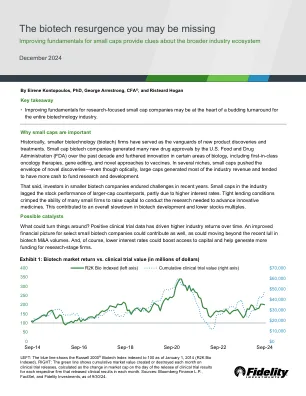
你可能错过的生物技术复兴
创造的市场价值反映了每月临床试验发布时创造或摧毁的累计市场价值,计算为每月发布临床结果的各公司在临床试验结果发布当天的市值变化。括号中为负市场价值。R2K 生物技术回报率是 Russell 2000® 生物技术指数的回报率。R2K 指数回报率是更广泛的 Russell 2000® 指数的回报率。相对回报率是两者之间的差额,四舍五入到最接近的整数百分比。* 截至 2024 年 9 月 30 日的 2024 年数据。资料来源:彭博金融有限合伙企业、FactSet 和富达投资,截至 2024 年 9 月 30 日。
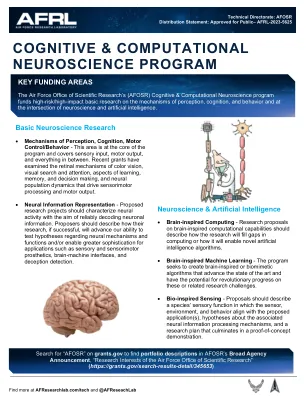
认知和计算神经科学计划
•感知,认知,运动控制/行为的机制 - 该区域是程序的核心,涵盖了感官输入,电动机输出以及介于两者之间的所有内容。最近的赠款研究了彩色视觉,视觉搜索和注意力,学习,记忆和决策的各个方面以及驱动感觉运动处理和运动输出的神经种群动态的视网膜机制。•神经信息表示 - 拟议的研究项目应表征神经活动,以可靠地解码神经元信息。提议者应描述他们的研究(如果成功)如何提高我们测试有关神经机制和功能的假设的能力,和/或为诸如感觉和感觉运动假体,脑镜界面和欺骗检测等应用的应用更加复杂。
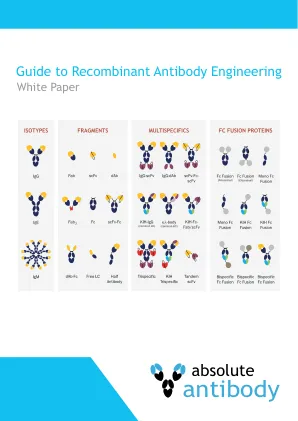
重组抗体工程指南 - 白皮书
抗体工程技术出现后,研究人员开始重组产生和产生抗体片段。开发了三个主要碎片,成为许多替代格式的基础。首先,重组Fab是酶消化产生的FAB的一种干净而定义的替代品。第二,单链变量片段(SCFV)是IgG的最小稳定且功能齐全的形式。它由可变的重域和可变光域组成,并在两者之间具有灵活的接头。最后,单个结构域抗体(DAB)缺乏轻链,代表大约15 kDa的最小结合域。单域抗体在骆驼和软骨鱼(例如鲨鱼)中发现,与传统的鼠和人类抗体相比,它们含有更长的CDR环。

考虑最佳传感器放置的考虑因素,以提高准确的对象定位,以定位于城市空气流动
先前对物体定位的研究表明,传感器放置和对齐在达到追踪城市空气流动性工具的估计位置的较高准确度中起着重要作用。通常,由于两者之间的重叠不确定性区域较小,地面节点观测矢量之间的近乎正交的相交导致了最高的精度。这适用于通过接地节点摄像机角度观测以及通过地面节点距离测量的三角剖分。但是,通过有限数量的静态基础节点和要本地化的移动对象的网络,这种简单的概念不容易实现。该案例研究进行了敏感性分析,并探讨了如何在这种情况下实现更高估计准确性水平的实用方法。