XiaoMi-AI文件搜索系统
World File Search System串行端口

规格表 HDVSU1-001
一般规格 电源部分 ........ 双输入冗余 电源监控 .... 包括 远程控制接口 ... 以太网和串行 串行端口连接器 ....... DE-9S(D 型母头)状态 LED ............... 前面板上的双色 前面板显示屏 .........2x20 LED 照明超扭曲 LCD 配置内存 ......FLASH 冷却 .................对流交流电源要求 .....90-264VAC,47-440Hz,15 瓦(最大)电源线 .............6 英尺 (Belden 17250) 保险丝保护 ............2A,5 毫米 (双),仅限 AC 型号重量 ...................7 磅尺寸 ....................1.75H x 9.55D x 19.00W (1RU) 3.50H x 9.55D x 19.00W (2RU) 工作温度 ...........0 至 +60C 非工作温度 .........-20 至 +85C 湿度 .................0 至 95% (NC @ +25C) MTBF ....................>150,000 小时认证 ......。。。。。。。。.CE EN61010

TAS3001C:数字音频处理器数据表 (Rev. B)
1 简介1-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................. ... . . . . . . 1.3.2 接口 1-2 . . . . . . . . . . . . . . . . . 1.3.3 电气和物理 1-2 . . . . . . . . . . . . . . . . 1.4 应用 1-2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4.1 数字音频控制 1-2 . . . . . . . . . . . . . . . 1.4.2 均衡 1-2 . . . . . . . . . . . . . . . . . . . . 1.4.3 扬声器有源分频器 1-2 . . . . . . . . . . . . . . . 1.5 功能框图 1−3 . . . . . . . . . . . . . . . . 1.6 混频/输入缩放 1−3 . . . . . . . . . . . . . . . . . . . . 1.7 高精度二阶双二阶滤波器结构 1−4 . . . . . . . . . 1.8 低音和高音控制 1−6 . . . . . . . . . . . . . . . . . 1.9 软音量和真正软静音 1−6 . . . . . . . . . . . . . . . . . 1.10 数字滤波的可靠性和灵活性 1−7 . . . . . . . . . . . . . . 1.11 引脚分配 1-7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.12 引脚功能 1-8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.14 电源 1−8 . . . . . . . . . . . . . . . . . . . . . . . 2 音频数据格式 2−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .... .... .... .... .... 3.1 I 2 C 协议 3−1 . .... .... ..................... ... . . . . . . . . . 3.2.2 I 2 C 时序和等待周期3−2. . . . . . . . . . . . . . 3.2.3 重置 TAS3001 I 2 C 接口3−3. . . . . . . . . . . . 3.2.4 上电条件3−3. . . . . . . . . . . . . . . . 3.2.5 I 2 C 串行端口时序 3−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 数字音频处理器 4−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................................................................................................................................................................

x600服务器完全坚固的笔记本电脑
I.RAID 5配置将需要3个X600服务器的存储,而无需突袭。II。 X600服务器RAID III中的默认规格。 第二高音54和第二个PCMCIA II型读卡器是相互排斥的。 iv。 DVD超级多驱动器和蓝光超级多驱动器是相互排斥的。 V.第二串行端口是可选的,与外部VGA相互排斥。 vi。 重量和尺寸因配置和可选配件而异。 vii。 X600服务器VIII的尺寸。 X600服务器突袭的维度。 ix。 MIL-STD-461 230W单独出售。 X. X600服务器没有RAID可以承受4ft下降。 xi。 在MIL-STD-810H之后,由独立的第三方测试实验室测试。 XII。 X600服务器RAID带有4个电池和一个交流适配器(230W,100-240VAC,50/60Hz)。 xiii。 150W AC适配器与X600服务器兼容。 xiv。 备用SSD套件是Enterprice PCIE SSD。 兼容II。X600服务器RAID III中的默认规格。第二高音54和第二个PCMCIA II型读卡器是相互排斥的。iv。DVD超级多驱动器和蓝光超级多驱动器是相互排斥的。V.第二串行端口是可选的,与外部VGA相互排斥。vi。重量和尺寸因配置和可选配件而异。vii。X600服务器VIII的尺寸。X600服务器突袭的维度。ix。MIL-STD-461 230W单独出售。X. X600服务器没有RAID可以承受4ft下降。xi。在MIL-STD-810H之后,由独立的第三方测试实验室测试。XII。 X600服务器RAID带有4个电池和一个交流适配器(230W,100-240VAC,50/60Hz)。 xiii。 150W AC适配器与X600服务器兼容。 xiv。 备用SSD套件是Enterprice PCIE SSD。 兼容XII。X600服务器RAID带有4个电池和一个交流适配器(230W,100-240VAC,50/60Hz)。xiii。150W AC适配器与X600服务器兼容。xiv。备用SSD套件是Enterprice PCIE SSD。兼容

盲人 AI 指导系统 - 实施
根据世界卫生组织的数据,世界上有超过三百万人是盲人。这些人在日常生活中遭受了很多困难。他们变得依赖他人,我们的系统帮助他们识别一些日常互动物体。该系统可以识别周围的物体,并使用语音指令将其通知给用户,由于系统生成的语音输出,整个系统的操作都可以被理解。用户可以向系统发出语音指令来执行他们想要执行的操作。该系统使用各种传感器,如摄像头、超声波传感器、PIR 传感器,从而提高了系统的运行效率。因此,它是物联网和人工智能的跨学科方法。通过使用单板计算机 Raspberry pi 4,我们执行我们创建的程序,该程序检测并向用户提供有关对象的信息。传感器由单独的 Arduino Uno r3 处理,并通过串行端口接口将其计算信号提供给 Raspberry Pi,这有助于最大限度地减少 Raspberry Pi 的计算工作。

ax-v-manual_eng.pdf
AXV 驱动器完全由软件控制;不需要或不可能进行任何硬件调整。控制软件(用于个性化设备)以及所有应用和调整参数都存储在设备非易失性存储器中,可以通过将驱动器与 PC 连接来访问和编辑。这种启动连接通常通过 RS 485 串行端口 1 执行。特定于应用程序的应用程序数据和调整参数集是应用程序数据库。要创建、检查、编辑和复制此数据库,AXV Cockpit 配置工具随平台一起提供。此工具安装在用于执行 AX-V 驱动器安装的 PC 中。AXV Cockpit 在安装期间充当驱动器的控制中心;它访问所有驱动器功能和参数,识别设备及其使用寿命,并允许复制到 1 和从 1 复制。AX-V 平台配备多点、行业标准 RS 485 串行链路。如果仅提供 RS 232 连接,则需要 RS 232 - RS 485 转换器。
tms320第二代数字信号处理器
80 ns 指令周期时间 544 字片上数据 RAM 4K 字片上安全程序 EPROM (TMS320E25) 4K 字片上程序 ROM (TMS320C25) 128K 字数据/程序空间 32 位 ALU/累加器 16 16 位乘法器,乘积为 32 位 用于数据/程序管理的块移动 重复指令以有效利用程序空间 用于直接编解码器接口的串行端口 用于同步多处理器配置的同步输入 用于与慢速片外存储器/外设通信的等待状态 用于控制操作的片上定时器 单 5V 电源 封装:68 引脚 PGA、PLCC 和 CER-QUAD 用于 EPROM 编程的 68 至 28 引脚转换适配器插座 提供商用和军用版本 NMOS 技术: — TMS32020 200 纳秒周期时间 . . . . . . . . CMOS 技术: — TMS320C25 100 纳秒周期时间 . . . . . . . . — TMS320E25 100 纳秒周期时间 . . . . . . . . — TMS320C25-50 80 纳秒周期时间 . . . . .

NXP LPC2364、LPC2366、LPC2368 数据表 - Keil
LPC2364/66/68 是多用途串行通信应用的理想选择。它们集成了 10/100 以太网媒体访问控制器 (MAC)、具有 4 kB 端点 RAM 的 USB 全速设备、四个 UART、两个 CAN 通道、一个 SPI 接口、两个同步串行端口 (SSP)、三个 I 2 C 接口和一个 I 2 S 接口。这些串行通信接口与片上 4 MHz 内部振荡器、高达 32 kB 的 SRAM、用于以太网的 16 kB SRAM、用于 USB 和通用用途的 8 kB SRAM 以及 2 kB 电池供电的 SRAM 相结合,使这些设备非常适合通信网关和协议转换器。各种 32 位计时器、改进的 10 位 ADC、10 位 DAC、一个 PWM 单元、一个 CAN 控制单元以及多达 70 条快速 GPIO 线(带有多达 12 个边缘或电平敏感的外部中断引脚)使这些微控制器特别适合工业控制和医疗系统。
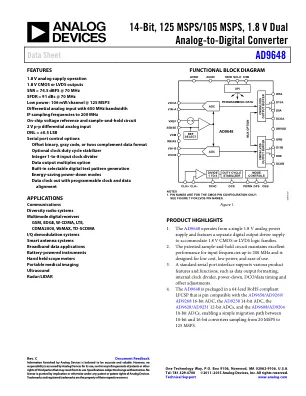
AD9648 | 数据表 - ADI 公司
1.AD9648 采用单个 1.8 V 模拟电源供电,并具有单独的数字输出驱动器电源,以适应 1.8 V CMOS 或 LVDS 逻辑系列。2.获得专利的采样保持电路在高达 200 MHz 的输入频率下仍能保持出色的性能,并且专为低成本、低功耗和易用性而设计。3.标准串行端口接口支持各种产品特性和功能,例如数据输出格式、内部时钟分频器、关断、DCO/数据时序和偏移调整。4.AD9648 采用符合 RoHS 标准的 64 引脚 LFCSP 封装,该封装与 AD9650 / AD9269 / AD9268 16 位 ADC、AD9258 14 位 ADC、AD9628 / AD9231 12 位 ADC 和 AD9608 / AD9204 10 位 ADC 引脚兼容,从而实现了 10 位和 16 位转换器之间的简单迁移路径,采样率为 20 MSPS 至 125 MSPS。

ACMR 系列 - S.K.M 空调有限责任公司
PC 软件可与 ACMR 微处理器通信,作为可选功能提供。软件名为 MCS-Connect,可为冷水机组微处理器提供本地和远程通信。该程序允许查看冷水机组的整个状态、输入、输出、设定点、警报组合图等。通过适当的授权,可以对系统进行更改。配置文件可以传输到设备或从设备接收。PC 和冷水机组微处理器之间的通信可以通过 RS-485 串行端口或以太网端口进行。如果有多个冷水机组,这些冷水机组可以通过 Rs-485 网络连接在一起,最多可支持 20 个冷水机组。可以通过 RS-485 或以太网连接本地访问此网络,也可以通过 14.4K 波特调制解调器远程访问。网络中的每个冷水机都必须分配一个唯一的地址。可以从设备的 LCD/键盘或通过 MCS-Connect 软件更改此地址。RS-485 传输长度不应超过 1 英里(无中继),RS-485 传输长度不应超过 1 英里(无中继器)。对于以太网通信,直接连接到 PC 时必须使用交叉电缆。此软件可以在 Windows 2000 或更新版本上运行。

用于...的高频传感器数据采集系统 (SDAC)
本文介绍了一种用于中小型无人机 (UAV) 飞行控制和气动数据收集研究的高频传感器数据采集系统 (SDAC)。该系统重量轻、功耗低,工作频率为 100 Hz,具有以下特点:高频、高分辨率六自由度 (6-DOF) 惯性测量单元 (IMU),配有全球定位系统 (GPS) 接收器、3 轴磁力计、皮托管、七个 10 位模数转换器 (ADC)、十六个 12 位模数转换器、一个 14 位模数转换器、二十个数字输入/输出 (I/O)、八个脉冲宽度调制 (PWM) 信号输入、一个 40 英里下行链路收发器、一个开放串行端口和一个开放 CANbus 端口,以及高达 64 GB 的板载存储。数据采集系统完全由商用现货 (COTS) 组件制成,从而降低了系统成本和实施时间。SDAC 将各种传感器流组合成统一的高保真状态数据流,该数据流被记录下来以供以后进行空气动力学分析,并同时转发到单独的处理单元,例如自动驾驶仪。