XiaoMi-AI文件搜索系统
World File Search System位置估计

基于无人机的 GPS 拒绝环境中目标跟踪的协作 Visual-SLAM 系统:以目标为中心的方法
摘要:使用无人机 (UAV) 自主跟踪动态目标是一个具有挑战性的问题,在许多场景中都有实际应用。在这种情况下,必须解决的一个基本方面与空中机器人的位置估计和控制飞行编队的目标有关。对于非合作目标,必须使用机载传感器估计其位置。此外,对于估计无人机的位置,全球位置信息可能并不总是可用的(GPS 拒绝环境)。这项工作提出了一种基于视觉的合作 SLAM(同步定位和地图绘制)系统,该系统允许一组空中机器人自主跟踪在 GPS 拒绝环境中自由移动的非合作目标。这项工作的贡献之一是提出并研究使用以目标为中心的 SLAM 配置来解决与众所周知的以世界为中心和以机器人为中心的 SLAM 配置不同的估计问题。从这个意义上说,所提出的方法得到了从广泛的非线性可观测性分析中获得的理论结果的支持。此外,还提出了一种控制系统,用于保持相对于目标的稳定无人机飞行编队。在这种情况下,使用 Lyapunov 理论证明了控制律的稳定性。通过采用大量计算机模拟,所提出的系统显示出可能优于其他相关方法。
文章:在 GPS 受限环境下基于无人机目标跟踪的协作式 Visual-SLAM 系统:以目标为中心的方法
摘要:使用无人机 (UAV) 自主跟踪动态目标是一个具有挑战性的问题,在许多场景中都有实际应用。在这种情况下,必须解决的一个基本方面与空中机器人和目标的位置估计有关,以控制飞行编队。对于非合作目标,必须使用机载传感器估计其位置。此外,为了估计无人机的位置,全球位置信息可能并不总是可用的(GPS 拒绝环境)。这项工作提出了一种基于视觉的合作 SLAM(同步定位和地图绘制)系统,该系统允许一组空中机器人自主跟踪在 GPS 拒绝环境中自由移动的非合作目标。这项工作的贡献之一是提出并研究使用以目标为中心的 SLAM 配置来解决估计问题,这与众所周知的以世界为中心和以机器人为中心的 SLAM 配置不同。从这个意义上讲,所提出的方法得到了广泛非线性可观测性分析所获得的理论结果的支持。此外,还提出了一种控制系统,用于保持无人机相对于目标的稳定飞行编队。在这种情况下,使用 Lyapunov 理论证明了控制律的稳定性。通过大量计算机模拟,所提出的系统显示出可能优于其他相关方法。

卫星和地面视图之间的跨注意,以增强细粒度的机器人地理位置
跨视图图像地理位置定位旨在通过用GPS标记的卫星图像补丁绘制当前的街道视图图像来确定户外机器人的位置。最近的作品在识别卫星贴片中达到了显着的准确性,该卫星贴片在机器人所在,其中将中央像素在匹配的卫星贴片中用作机器人粗糙位置估计。这项工作着重于机器人在已知的卫星贴片中的细粒度定位。现有的细颗粒定位工作利用相关操作来获得卫星图像本地描述符和街道视图全局描述符之间的相似性。基于衬里匹配的相关操作简化了两个视图之间的相互作用过程,从而导致距离误差很大并影响模型的概括。为了解决这个问题,我们设计了一个具有自我注意力和跨注意层的跨视图功能fu-sion网络,以取代相关操作。此外,我们将分类和回归预测结合在一起,以进一步降低位置距离误差。实验表明,我们的新型网络体系结构的表现优于最先进的,可以在看不见的地区更好的概括能力。具体而言,我们的方法在同一区域和在活力基准的同一区域和看不见的区域中分别将中位定位距离误差降低了43%和50%。
使用基于 RSSI 的位置信号对无人机群进行高级控制...
使用自主无人机协作群调查区域并收集有关失踪人员位置的信息,可以为搜索和救援行动带来巨大好处。本文研究了无人机群算法,该算法可防止代理对之间以及代理与静态障碍物之间的碰撞。该群由具有通信约束的低成本协作固定翼飞机组成。首先开发了一种分散式群体行为,假设系统能够提供所有飞机的准确位置。此外,代理通过使用 RSSI 测量来估计其位置。所有代理都配备了通信设备和广播无线电信号,并测量接收到的信号强度,以估计与其他群成员的距离。这些估计值进一步用于开发多点定位算法,其中每个代理使用来自至少三个附近代理的距离估计来估计自己的位置。通过添加飞机运动学的动态模型,可以提供更准确的估计,其中考虑了错误的位置估计。在 MATLAB 中,在 2-D 环境中模拟了自主群。代理实时做出决策,其运动由势场和信息素水平控制。排斥势用于防止碰撞,吸引势用于形成无人机集群,以便所有成员都保持在通信范围内。群体也被吸引到环境中未探索的区域。当提供真实的无人机位置时,开发的势场算法在控制群体方面确实显示出有希望的结果。代理对之间或代理与障碍物之间没有发生碰撞。代理没有越界,群体很强大,因为它能够处理单个成员的丢失。对于基于 RSSI 的位置估计方法,需要进一步开发群体行为。通信设备的接收器灵敏度限制了代理之间的最大距离及其滚动角度差异。当发生单个故障或障碍物阻碍群体路径时,并不总是有足够的 RSSI 测量值可用于执行
阿尔及利亚君士坦丁国立理工学院电气工程实验室(LGEPC) (1) 科学学院 ETA 实验室
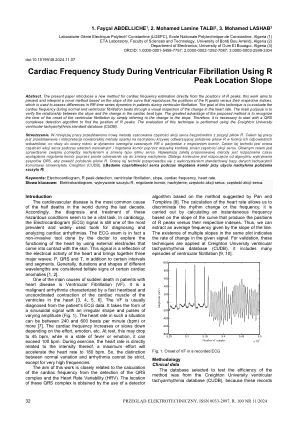
阿尔及利亚康斯坦丁国立理工学院君士坦丁综合电气实验室 (LGEPC) (1) 阿尔及利亚博尔吉布阿拉里季大学科学技术学院 ETA 实验室 (2) 阿尔及利亚乌姆布阿吉大学电子系 (3) ORCID:1.0000-0001-5458-7757;2.0000-0002-1292-7087;3.0000-0003-2599-3304 doi:10.15199/48.2024.11.07 使用 R 峰位置斜率进行心室颤动期间的心脏频率研究摘要。本文介绍了一种直接从 R 峰位置估计心率的新方法,该方法旨在提出和解释一种基于曲线斜率的新方法,该方法重现了 R 峰相对于其各自指数的位置,用于评估患者在心室颤动期间 RR 时间序列动态的差异。该技术的目标是通过目视检查心率变化来评估正常和心室颤动期间的心率。主要目的是验证斜率与心跳类型变化之间的关系。所提出方法的最大优点是只需参考斜率的变化即可识别心室颤动的发作时间。因此,有必要从 QRS 复合波检测算法开始,以找到 R 峰的位置。使用克雷顿大学室性心动过速标准数据库 (CUDB) 对该技术进行评估。Streszczenie。 W niniejszej pracy przedstawiono nową methodę szacowania częstości akcji serca bezpośrednio z pozycji pików R. Celem tej pracy jest przedstawienie iterpretacja nowatorskiej metody opartej na nachyleniu krzywej odtwarzającej R 与 funkcji ich odpowiednich wskaźników、co służy do oceny różnic 和动态 szeregów czasowych RR u pacjentów z migotaniem komór。 Celem tej techniki jest ocena częstości akcji serca podczas uderzeń normalnych i migotania komór poprzez wizualną kontrolę zmian częstości akcji serca. Głównym celem jest sprawdzenie związku pomiędzy nachyleniem a zmianą typepu rytmu serca。 Największą zaletą proponowanej 方法开玩笑 rozpoznanie czasu wystąpienia migotania komór poprzez proste odniesienie się do zmiany nachylenia。 Dlatego konieczne jest rozpoczęcie od algorytmu wykrywania zespołów QRS, aby znaleźć położenie pików R. Ocenę tej techniki przeprowadza się z wykorzystaniem standardowej bazy danych tachyarytmii komorowej克赖顿大学 (CUDB)。 (( Badanie częstotliwości serca podczas migotania komór przy użyciu nachylenia położenia szczytu R ) 关键词:心电图、R 峰值检测、心室颤动、斜率、心频率、心率。 Słowa kluczowe:心电图、wykrywanie szczytu R, migotanie komór、nachylenie、częstość akcji serca、częstość akcji serca。简介 心血管疾病是过去十年中全球一半以上人口死亡的最常见原因。因此,诊断和治疗这些危险疾病似乎是一项至关重要的任务。在心脏病学中,心电图 (ECG) 信号仍然是诊断和分析心律失常最普遍和最广泛使用的工具之一。ECG 检查实际上是医生使用接触皮肤的外部电极来探索心脏功能的一种非侵入性工具。该信号反映了心脏的电活动,除了某些间隔和节段外,它还汇集了三种主要波:P、QRS 和 T。通常,不同波长的持续时间和形状被认为是某些心脏异常的迹象 [1, 2]。心脏病患者猝死的主要原因之一是心室颤动 (VF)。这是一种恶性心律失常,特征为心跳过快、心室心肌收缩不协调 [3, 4, 5, 6]。VF 通常通过患者的 ECG 数据进行诊断。它呈现为形状不规则、脉冲幅度不等的正弦信号(图 1)。在这种情况下,心率可能在每分钟 240 到 600 次 (bpm) 之间或更高 [7]。心率会根据用力、情绪等因素而增加或减慢。在休息时,心率可能会降至 45 bpm,而在发烧或情绪激动时,心率可能会超过 100 bpm。在运动期间,心率与运动强度直接相关,最大用力会使心率加速到 180 bpm。因此,正常变化与心律失常之间的区分并不严格,除非频率非常高。这项工作的目的与通过检测 QRS 波群和心率变异性 (HRV) 计算心率密切相关。这些 QRS 波群的位置是通过使用检测器获得的这是一种恶性心律失常,特征为心跳过快、心室心肌收缩不协调 [3, 4, 5, 6]。VF 通常通过患者的 ECG 数据进行诊断。它呈现为形状不规则、脉冲幅度不等的正弦信号(图 1)。在这种情况下,心率可能在每分钟 240 到 600 次 (bpm) 之间或更高 [7]。心率会根据用力、情绪等因素而增加或减慢。在休息时,心率可能会降至 45 bpm,而在发烧或情绪激动时,心率可能会超过 100 bpm。在运动期间,心率与运动强度直接相关,最大用力会使心率加速到 180 bpm。因此,正常变化与心律失常之间的区分并不严格,除非频率非常高。这项工作的目的与通过检测 QRS 波群和心率变异性 (HRV) 计算心率密切相关。这些 QRS 波群的位置是通过使用检测器获得的这是一种恶性心律失常,特征为心跳过快、心室心肌收缩不协调 [3, 4, 5, 6]。VF 通常通过患者的 ECG 数据进行诊断。它呈现为形状不规则、脉冲幅度不等的正弦信号(图 1)。在这种情况下,心率可能在每分钟 240 到 600 次 (bpm) 之间或更高 [7]。心率会根据用力、情绪等因素而增加或减慢。在休息时,心率可能会降至 45 bpm,而在发烧或情绪激动时,心率可能会超过 100 bpm。在运动期间,心率与运动强度直接相关,最大用力会使心率加速到 180 bpm。因此,正常变化与心律失常之间的区分并不严格,除非频率非常高。这项工作的目的与通过检测 QRS 波群和心率变异性 (HRV) 来计算心率密切相关。这些 QRS 波群的位置是通过使用检测器获得的