机构名称:
¥ 1.0
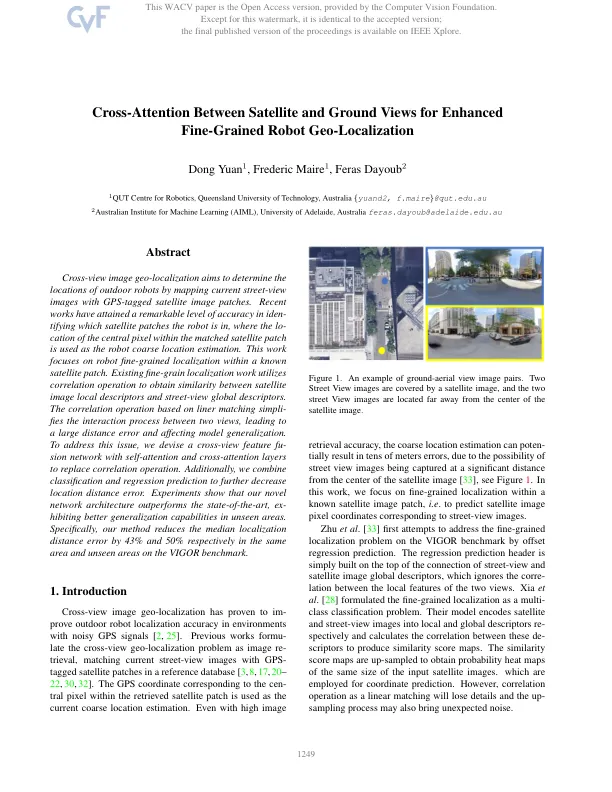
跨视图图像地理位置定位旨在通过用GPS标记的卫星图像补丁绘制当前的街道视图图像来确定户外机器人的位置。最近的作品在识别卫星贴片中达到了显着的准确性,该卫星贴片在机器人所在,其中将中央像素在匹配的卫星贴片中用作机器人粗糙位置估计。这项工作着重于机器人在已知的卫星贴片中的细粒度定位。现有的细颗粒定位工作利用相关操作来获得卫星图像本地描述符和街道视图全局描述符之间的相似性。基于衬里匹配的相关操作简化了两个视图之间的相互作用过程,从而导致距离误差很大并影响模型的概括。为了解决这个问题,我们设计了一个具有自我注意力和跨注意层的跨视图功能fu-sion网络,以取代相关操作。此外,我们将分类和回归预测结合在一起,以进一步降低位置距离误差。实验表明,我们的新型网络体系结构的表现优于最先进的,可以在看不见的地区更好的概括能力。具体而言,我们的方法在同一区域和在活力基准的同一区域和看不见的区域中分别将中位定位距离误差降低了43%和50%。
卫星和地面视图之间的跨注意,以增强细粒度的机器人地理位置
主要关键词



相关文件推荐