XiaoMi-AI文件搜索系统
World File Search System低精度

使用低精度异构声纳浮标传感器的纯角度测量定位水下目标
摘要:本文考虑了水下目标的定位,其中放置了许多声纳浮标来测量目标声音的方位。声纳浮标的方位精度非常低,例如 10 度。在实践中,我们可以使用多个异构声纳浮标,这样传感器噪声的方差可能与另一个传感器的方差不同。此外,一个传感器的最大感应范围可能与另一个传感器的最大感应范围不同。如果传感器检测到目标的方位,则真实目标必须存在于传感器的感应范围内。为了基于低精度的方位测量来估计目标位置,本文介绍了一种基于多个虚拟测量集 (VMS) 的新型目标定位方法。这里,每个 VMS 都是考虑到每个声纳传感器的方位测量噪声而得出的。据我们所知,本文在基于低精度的异构声纳浮标传感器定位目标的 2D 位置方面是新颖的,考虑到传感器的最大感应范围。通过使用计算机模拟将所提出的定位方法与其他最先进的定位方法进行比较,验证了所提出的定位方法的优越性(同时考虑时间效率和定位精度)。
文章 使用低精度异构声纳浮标传感器的纯角度测量来定位水下目标
摘要:本文考虑了水下目标的定位,其中放置了许多声纳浮标来测量目标声音的方位。声纳浮标的方位精度非常低,例如 10 度。在实践中,我们可以使用多个异构声纳浮标,这样传感器噪声的方差可能与另一个传感器的方差不同。此外,一个传感器的最大感应范围可能与另一个传感器的最大感应范围不同。如果传感器检测到目标的方位,则真实目标必须存在于传感器的感应范围内。为了基于低精度的方位测量来估计目标位置,本文介绍了一种基于多个虚拟测量集 (VMS) 的新型目标定位方法。这里,每个 VMS 都是考虑到每个声纳传感器的方位测量噪声而得出的。据我们所知,本文在考虑传感器的最大感应范围的情况下,基于低精度的异构声纳浮标传感器对目标的 2D 位置进行定位方面是新颖的。通过使用计算机模拟将所提出的定位方法与其他最先进的定位方法进行比较,验证了所提出的定位方法的优越性(同时考虑时间效率和定位精度)。

脉冲网络中使用忆阻器进行持续学习的概率元可塑性
在动态环境中运行的边缘设备迫切需要能够持续学习而不会发生灾难性遗忘。这些设备中严格的资源限制对实现这一目标构成了重大挑战,因为持续学习需要内存和计算开销。使用忆阻器设备的交叉开关架构通过内存计算提供能源效率,并有望解决此问题。然而,忆阻器在电导调制中通常表现出低精度和高可变性,这使得它们不适合需要精确调制权重大小以进行整合的持续学习解决方案。当前的方法无法直接解决这一挑战,并且依赖于辅助高精度内存,导致频繁的内存访问、高内存开销和能量耗散。在这项研究中,我们提出了概率元可塑性,它通过调节权重的更新概率而不是大小来整合权重。所提出的机制消除了对权重大小的高精度修改,从而消除了对辅助高精度内存的需求。我们通过将概率元可塑性集成到以低精度忆阻器权重在错误阈值上训练的脉冲网络中,证明了所提机制的有效性。持续学习基准的评估表明,与基于辅助内存的解决方案相比,概率元可塑性实现了与具有高精度权重的最先进的持续学习模型相当的性能,同时用于附加参数的内存消耗减少了约 67%,参数更新期间的能量消耗减少了约 60 倍。所提出的模型显示出使用低精度新兴设备进行节能持续学习的潜力。

为无乘法器 GEMM 解锁价值级并行性
摘要 近年来,针对通用矩阵乘法 (GEMM) 优化的硬件架构已得到深入研究,以为深度神经网络提供更好的性能和效率。随着分批、低精度数据(例如本文中的 FP8 格式)的趋势,我们观察到值重用的未开发潜力越来越大。我们提出了一种新颖的计算范式,即值级并行,其中唯一的乘积只计算一次,不同的输入通过时间编码订阅(选择)它们的乘积。我们的架构 Carat 采用值级并行并将乘法转换为累积,使用高效的无乘法器硬件执行 GEMM。实验表明,平均而言,Carat 可将等面积吞吐量和能源效率提高 1.02 ⇥ 和 1.06 ⇥(相对于脉动阵列)以及 3.2 ⇥ 和 4 ⇥。 3⇥当扩展到多个节点时。

IAES国际人工智能杂志(IJ-AI)
迁移学习使我们能够利用从一项任务中获得的知识来帮助解决另一项相关的任务。在现代计算机视觉研究中,问题是哪种架构对于给定的数据集表现更好。在本文中,我们比较了 14 个预训练的 ImageNet 模型在组织病理学癌症检测数据集上的表现,其中每个模型都配置为朴素模型、特征提取器模型或微调模型。Densenet161 已被证明具有高精度,而 Resnet101 具有高召回率。当后续检查成本高时,适合使用高精度模型,而当后续检查成本低时,可以使用低精度但高召回率/灵敏度的模型。结果还表明,迁移学习有助于更快地收敛模型。
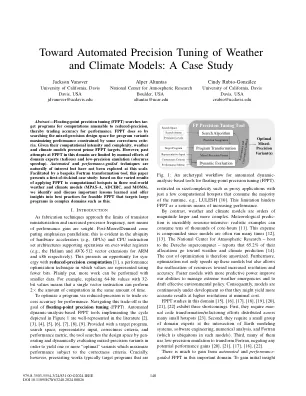
朝着天气和气候模型的自动精确调整:案例研究
摘要 - 浮点精度调整(FPPT)搜索TAR-获取可降低精确度的计算程序的程序,从而交易绩效准确性。fppt通过搜索程序变体的混合精确设计空间来最大程度地受到某些正确性crite-crite-ria的约束。鉴于它们的计算强度和复杂性,天气和气候模型呈现出主要的FPPT目标。然而,过去在该领域的FPPT尝试受到域专家(乏味)和低精度仿真(掩盖速度)的手动努力的限制。自动化和性能引导的技术自然是感兴趣的,但尚未在此规模上探索。由定制的福特转换工具促进,本文介绍了第一个案例研究:基于在三个现实世界中的天气和气候模型中将FPPT应用于计算热点的各种结果(MPAS-A,ADCIRC和MOM6)(MOM6),我们确定和讨论了众多的范围,以获取最佳的范围,以获取最佳的范围。 这。

用于冷原子中两个正交极化的腔增强和长寿命光学存储器
摘要:光量子存储器的存储和检索效率 (SRE) 和寿命是扩大量子信息处理规模的两个关键性能指标。在这里,我们通过实验演示了用于冷原子集合中的两种极化的腔增强长寿命光学存储器。利用电磁感应透明 (EIT) 动力学,我们分别演示了左圆和右圆偏振信号光脉冲在原子中的存储。通过使信号和控制光束共线穿过原子并将信号光的两种偏振存储为两个磁场不敏感的自旋波,我们实现了长寿命 (3.5 毫秒) 的存储器。通过在冷原子周围放置一个低精度光学环腔,信号光和原子之间的耦合得到增强,从而导致 SRE 增加。所提出的腔增强存储表明 SRE 约为 30%,对应于固有 SRE 约为 45%。

基于雷达测速与车辆识别的超速抓拍系统
摘要:超速行驶一直以来都是人们非常危险的行为,可能会造成车祸、人员伤亡等各种不良后果。现在我们需要能够在检测到超速的同时,获取车辆的相关信息,以便进行后续处罚,否则肇事者可能会再次作案。本文提出了一种高精度、高效的超速车辆拍照及车辆识别方法。我们将雷达测速模块与摄像头模块直接连接,这样整个系统只有一个终端,当雷达模块检测到车辆超速行驶时,会直接发送给摄像头模块,这样就可以抓拍到超速车辆,加快了摄像头模块的响应速度。因此,在设计成像设备时,可以在不降低精度的情况下降低要求,即使选择价格低廉、质量较差的摄像头,也可以及时抓拍到图像。最后,我们利用图像处理和支持向量机对车牌进行识别。整个系统设备不多,可以安装在狭小的空间内。

量子图神经网络方法实现粒子径迹重建
预计高亮度大型强子对撞机 (HL-LHC) 实验的跟踪探测器所需的计算复杂度和数据规模将空前增加。虽然目前使用的基于卡尔曼滤波器的算法在同时发生的碰撞数量、占用率和可扩展性(比二次方差)的模糊性方面已达到极限,但人们正在探索各种用于粒子轨迹重建的机器学习方法。HEP.TrkX 之前使用 TrackML 数据集证明,图形神经网络通过将事件处理为连接轨迹测量的图形,可以通过将组合背景减少到可管理的数量并扩展到计算上合理的大小来提供有希望的解决方案。在之前的工作中,我们展示了量子计算对图形神经网络进行粒子轨迹重建的首次尝试。我们旨在利用量子计算的能力同时评估大量状态,从而有效地搜索大型参数空间。作为本文的下一步,我们提出了一种改进的模型,采用迭代方法来克服初始过度简化的树张量网络 (TTN) 模型的低精度收敛问题。

lbkt:长期序列数据的基于LSTM BERT的知识跟踪模型
摘要。知识追踪领域(KT)旨在通过分析他们的历史行为数据来了解学生如何随着时间的推移学习和掌握知识。为了实现这一目标,许多研究人员提出了使用智能辅导系统(ITS)的数据来预测学生随后的行动的KT模型。然而,随着其大规模数据集的发展,包含长期数据的大规模数据集开始出现。最近基于深度学习的KT模型在处理包含长期数据的大规模数据集时面临着低效率,低精度和低解释性的障碍。To address these is- sues and promote the sustainable development of ITS, we propose a L STM B ERT-based K nowledge T racing model for long sequence data processing, namely LBKT , which uses a BERT-based architecture with a Rasch model-based embeddings block to deal with different difficulty levels information and an LSTM block to process the sequential char- acteristic in students' actions.LBKT在ACC和AUC指标上实现了大多数基准数据集的最佳性能。