XiaoMi-AI文件搜索系统
World File Search System倒旋

与强旋的相关材料中的新兴现象...
摘要:这是对R 3×S 1的物理学物理学的教学介绍,使用SU(2)Yang -Mills,其大规模或无质量的伴随费米子作为主要的例子;我们还添加了基础,以得出结论。较小的限制非常明显,可以在这些理论(主要是非肌对象)理论中对非扰动物理的控制半经典测定。我们首先审查了r 3上的polyakov构造机制。移至R 3×S 1,我们展示了引入伴随费米子如何稳定中心对称性,从而导致Abelianization和Semiclas-Sial-sical可计算性。我们解释了单极 - instantons和扭曲的单极 - instantons是如何出现的。我们描述了各种新型拓扑激发在将Polyakov的结构扩展到本地四维情况下的作用,讨论了结合字符串的性质以及θ角度的性质。我们研究了全局对称性实现,并在可用的情况下研究了没有相变为S 1大小的函数的证据。我们的目的不是涵盖有关该主题的所有工作,而是要准备兴趣的读者进行研究,我们还提供了对详细介绍的主题的简要描述:对路径积分的分析延续,对更一般的理论的研究以及涉及高级较高符号的't Hooft Anomalies的必要性。

低成本旋涂机与无线物联网的开发......
一种低成本旋涂机,带有无线遥控系统,可以以比传统方法低得多的成本沉积厚度和质量均匀的薄膜。该系统由三个主要部分组成,一个电动主轴、一个旋涂头和一个连接到网络的控制系统。机械部分的机械设计、使用 ESP32 的旋涂机系统设计以及通过 Visual Basic 实现无线控制。支持网络的控制系统允许实时监控和调整沉积过程,从而提高效率和可重复性。对于寻求以传统系统一小部分成本获得薄膜沉积技术的组织来说,这种低成本旋涂系统是一种有前途的解决方案。通过将无线物联网控制集成到低成本旋涂机中,该技术对涂层均匀性的影响将为该领域的未来发展提供宝贵的见解。

使用覆盖路径规划的多旋翼无人机进行飞机检查
2.1 覆盖路径规划. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 2.1.3 近似分解. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .................................................................................................................................................................................21 2.3.2 结构检查....................................................................................................................................................................................25 2.3.3 结论....................................................................................................................................................................................................25 2.3.3 结论....................................................................................................................................................................................................25 27
ADM 踝足矫形器和外旋杆的优点
1934 年,伦敦大奥蒙德街医院的丹尼斯·布朗爵士首次描述了传统的靴子和杆式足外展支架,这种支架被国际公认为预防马蹄足复发的标准矫形器。尽管多年来,丹尼斯·布朗支架的概念并没有发生太大的变化,但 C-Pro Direct 最先进的 ADM AFO 和外旋杆代表了重大进步,同时忠实于 Ponseti 博士提出的要求。ADM AFO 和外旋杆的每一个细节都经过精心设计,以最大限度地提高临床表现和患者依从性。该支架更轻、更坚固,外观时尚,同时融入了许多创新设计特点,以促进最佳临床效果。本文档解释了与所有当前替代方案相比,C-Pro Direct 的马蹄足 ADM AFO 和外旋杆马蹄足支架为何以及如何:• 更好地促进伸直外侧边缘的发展并减少高弓足畸形• 更好地促进足部活动性和活动范围的增加• 更好地固定足部,更贴身舒适,比最流行的替代系统轻 32% 且更坚固• 降低皮肤破损、水泡和溃疡的风险• 如果需要更换支架类型,可降低成本• 鼓励更好地遵守支撑协议并获得护理人员/父母的认可• 减少患者在诊所的时间并确保正确应用规定的杆配置• 使马蹄足患者能够从彻底改变现代主流鞋类制造业的先进制造技术中受益最终,这些巨大的优势转化为更好的患者治疗效果和更低的治疗成本。这就是为什么所有马蹄足临床医生现在都应该考虑使用 ADM 模块化支撑系统的原因。

对“二旋疾病黑素氧基”的评论 - ijrpr
二旋疾病黑色素氧基于Ebenaceae家族的开花植物,树皮坚硬且脱水[4]。它有很大的预期名词通过印度东南部海岸Coromandel获得。根据Troup(1921)Diospyros Melanoxylon(D. tomentosa和D. tupru的详尽)是普遍穿过印度干燥落叶森林地区的最具品牌名称的树木之一[5] Coromandel[6].该植物在南部的尼尔吉里斯和塞拉瓦利斜率上也相似。白话称为Temburini。二旋植物与家庭埃比尼科有一个斑点,该家族有400多种在地球的热带和亚热带地区传播的[7]。
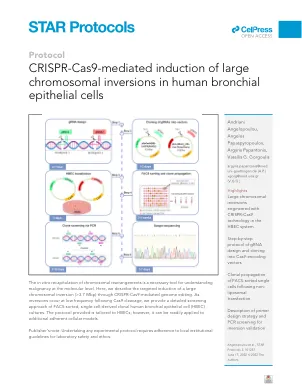
CRISPR-Cas9 介导诱导人类支气管上皮细胞发生大型染色体倒位
1. 通过 UCSC 基因组浏览器 ( https://genome.ucsc.edu/ ) 可获得用于设计两个 gRNA 的目标 DNA 序列。a. 选择感兴趣的基因组版本。在我们的例子中,使用的是“人类 GRCh38/hg38”。b. 根据已知的倒位断点 1 的位置,标记断点前 100-150 bp 到断点后 100–150 bp 范围内的基因组区域。例如,如果断点 1 位于 chr3:2,920,305,则在 UCSC 基因组浏览器搜索框中输入“chr3:2,920,205–2,920,405”以标记所需的染色体区域,然后单击“Go”。c. 在 UCSC 基因组浏览器工具栏上选择“查看”,然后单击“DNA”选项。d.在新窗口中,单击“获取 DNA”以获得准确的 DNA 序列。这是使用 CRISPOR 算法设计 gRNA 引物所需的序列(见下面的步骤 2a)。e. 对倒位的断点 2 重复步骤 1a-1d。2. 要设计 gRNA,请使用 CRISPOR 算法(http://crispor.tefor.net/):a. 输入从步骤 1d 获得的断点 1 的 DNA 序列。确保参考基因组与 UCSC 浏览器(步骤 1a)中使用的基因组相匹配,然后选择可通过转染载体编码的 Cas9 酶类型识别的 Protospacer Adjacent Motif (PAM)。如果转染载体表达 SpCas9,则选择 20 bp-NGG PAM 格式。单击“提交”以获得针对模板 DNA 的候选 gRNA 序列。b. CRISPOR 算法默认按特异性从高到低对候选 gRNA 序列进行排序,因为这是关键参数。从新页面上出现的候选 gRNA 列表中,选择具有最高麻省理工学院 (MIT) 和切割频率确定 (CFD) 特异性得分的指导序列(Doench 等人,2016 年;Hsu 等人,2013 年;Tycko 等人,2019 年)。这些分数根据以下方面评估候选 gRNA

基于牛顿-欧拉法的六旋翼飞行器运动方程研究
摘要 本文旨在设计和研究无人驾驶飞行器 (UAV) 六旋翼飞行器在三维空间中的动态模型。基于牛顿-欧拉法确定了导出的运动方程。这些方程具有非线性和耦合性。此外,为了使六旋翼飞行器具有真实的运动,模型中还嵌入了气动效应和扰动。六旋翼飞行器是一种垂直起降 (VTOL) 飞行器,具有悬停能力和灵活性,因此与固定翼飞行器相比毫不逊色。尽管如此,它的动态模型很复杂,被描述为不稳定的,并且不能在不扭转其轴的情况下进行平移运动。除了控制和仿真设计模块外,还通过 LabVIEW 软件建立了结论性数学模型。因此,对多个实验状态的稳定性进行了分析,以便提前展示用于平衡和轨迹跟踪的适当控制器。关键词:——无人机,六旋翼飞行器动力学,非线性控制,耦合和欠驱动模型,牛顿-欧拉方法。

克利福德代数、代数旋量、量子信息……
在相对论量子力学中,1、2 Cliifford 代数自然地出现在狄拉克矩阵中。协变双线性、手性、CPT 对称性是一些在该理论中发挥基本作用的数学对象,它们以狄拉克代数的旋量和生成器的形式建立。Cliifford 代数的普遍性表明,它们有可能成为量子计算 3、4 和高能物理之间的纽带。事实上,最近 Martinez 等人 5 使用低 q 捕获量子离子计算机对网络规范理论进行了模拟实验演示。还观察到了粒子-反粒子产生机制与系统纠缠之间的关系,通过对数负性来衡量。此外,还有几篇论文将 Cliifford 代数技术用于量子计算。6 – 14

同位旋致密物质和核状态方程的 QCD 约束
了解致密强子物质的行为是核物理学的一个核心目标,因为它决定着超新星和中子星等天体物理物体的性质和动力学。由于量子色动力学 (QCD) 的非微扰性质,人们对这些极端条件下的强子物质知之甚少。在这里,格点 QCD 计算用于计算热力学量和 QCD 状态方程,这些方程发生在具有受控系统不确定性的广泛同位旋化学势范围内。当化学势较小时,与手性微扰理论一致。与大化学势下的微扰 QCD 进行比较,可以估计超导相中的间隙,并且该量与微扰测定结果一致。由于同位旋化学势的配分函数 μ I 限制了重子化学势的配分函数 μ B ¼ 3 μ I = 2 ,这些计算还首次在很宽的重子密度范围内对对称核物质状态方程提供了严格的非微扰 QCD 界限。

6 自由度多旋翼飞行器的建模与控制:空气球...
我要感谢我的导师:Markus Wilde 博士、Tiauw Go 博士和 James Brenner 博士,感谢他们在我在佛罗里达理工学院的整个学术生涯中给予我的耐心、指导和支持。如果没有他们的专业知识,这篇论文就不可能完成。我要特别感谢 Wilde 博士,他从大三设计到大四设计一直指导这个项目,并将其变成一个论文项目。这个项目给了我一个成长为工程师的绝佳机会。我还要感谢我的矩阵主管 Jose Nunez 博士,他给了我一个新毕业的工程专业学生机会,并给了我在 NASA KSC 工作的机会。特别感谢我的 NASA 导师:Mike DuPuis 和 Michael Johansen,感谢他们的耐心以及他们在建模和控制方面的丰富知识。当然,我要向 NASA KSC 飞行技术部门的所有人表示感谢。最后,我要感谢我的朋友 James (Jimmy) Byrnes、Andrew Czap、Juliette Bido 和 Charles (Joe) Berry 在本论文的整个过程中给予的支持和投入。我很自豪地说,我和他们是同班同学。