XiaoMi-AI文件搜索系统
World File Search System光纤束

IDB-A多级运动计划:光纤束配方
抽象的高维运动计划问题通常可以通过使用多级抽象来更快地解决。虽然有多种方式正式捕获多级抽象,但我们以纤维束的方式制定了它们。纤维束基本上使用本地产品空间来描述状态空间的低维投影,这使我们能够根据捆绑限制和捆绑截面来简化和得出新颖的算法。鉴于这种结构和相应的可允许约束函数,我们为高维状态空间开发了高度有效和基于最佳采样的运动计划方法。这些方法通过使用捆绑图来利用捆绑的结构。这些原语用于创建新颖的捆绑计划者,快速探索商的空间树(QRRT*)和商空间路线图计划者(QMP*)。两个计划者均显示出概率完整且几乎渐近地最佳。为了评估我们的捆绑计划者,我们将它们与四个低维情况的基准测试和基于经典的计划者进行了比较,以及八个高维场景,范围从21至100度的自由度不等,包括多个机器人和非健康的约束。我们的发现显示了多达2到6个数量级的改进,并强调了多级运动计划者的效率以及使用Fier Bundles的术语来利用多级抽象的有益。
IDB-A 多级运动计划:光纤束配方
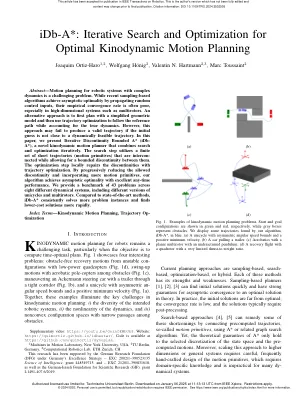
摘要 - 具有复杂动态的机器人系统的动态计划是一个具有挑战性的问题。最近基于抽样的算法通过传播随机控制输入来实现渐近最优性,但它们的经验收敛速率通常很差,尤其是在高维系统(如多电动器)中。另一种方法是使用简化的几何模型进行首先计划,然后使用轨迹优化来遵循参考路径,同时考虑真实动力学。但是,如果初始猜测不接近动态可行的轨迹,则此方法可能无法产生有效的轨迹。在本文中,我们提出了迭代的不连续性A*(IDB- a*),这是一种新型的运动动力运动计划者,可以迭代地结合搜索和优化。搜索步骤利用了有限的短轨迹(运动原语),这些轨迹是相互互连的,同时允许它们之间存在界限的不连续性。优化步骤在本地通过轨迹优化的不连续性进行了修复。通过逐步降低允许的不连续性并结合更多的运动原始性,我们的算法可实现渐近最优性,并在任何时候表现出色。我们提供了八个不同动力学系统的43个问题的基准,包括不同版本的独轮和多旋转器。与最先进的方法相比,IDB-A*始终如一地解决了更多的问题实例,并更快地发现了较低成本的解决方案。
第85章
_______________________________________________________________________________ 2- Bangladesh Customs Tariff _______________________________________________________________________________ The expression “printed circuits” does not cover circuits combined with elements other than those obtained during the printing process, nor does it cover individual, discrete resistors, capacitors or inductances.打印电路可能装有未打印的连接元素。薄膜或厚膜电路,其中包括在同一技术过程中获得的被动和活性元素,将分类为85.42的标题。7.-出于标准85.36的目的,“光纤,光纤束或电缆的连接器”是指仅机械地将光纤纤维在数字线系统中端到头的连接器。他们没有执行其他功能,例如信号的扩增,再生或修改。8.-标题85.37不包括电视接收器或其他电气设备遥控器的无绳红外设备(标题85.43)。9.-出于标题的目的85.41和85.42:

dts0095-梁拆分器/组合器
光纤束拆分器用于将光从一个纤维分为两个或更多纤维。首先将输入纤维的光准直接发送,然后通过光束分裂的视频发送将其分为两部分。然后将结果输出梁聚焦到输出纤维中。1xn和2xn拆分器都可以以这种方式构建多达八个或以上的输出,而低回报损失和低插入损失。此设计非常灵活,使人们可以在不同端口上使用不同的纤维类型,并在内部使用不同的梁分离器光学器件。常规制造的定制设计结合了循环器,两极分化的溅射器和非极化拆分器。可以用永久连接到每个端口(辫子样式)的纤维或每个端口上的插座制成拆分器。我们还可以用Bui lt-In beamsplitters为激光或激光二极管源构建源源。有关详细信息,请联系Oz。
光电智能 - NIST 的 TSAPPS
通用智能涉及将许多信息源整合成一个连贯、自适应的世界模型。要设计和构建通用智能硬件,我们必须考虑神经科学和超大规模集成的原理。对于能够实现通用智能的大型神经系统,用于通信的光子学和用于计算的电子学的属性是互补和相互依赖的。使用光进行通信可以实现跨大型系统的高扇出率和低延迟信号传输,而不会出现依赖流量的瓶颈。对于计算,约瑟夫森电路固有的非线性、高速度和低功耗有利于复杂的神经功能。在 4 K 下操作可以使用单光子探测器和硅光源,这两个特性可以实现效率和经济的可扩展性。在这里,我概述了光电硬件的概念,从突触电路开始,继续进行晶圆级集成,并扩展到与光纤束互连的系统,可能达到人脑的规模甚至更大。
第八十五章
8.- 就税目 85.34 而言,“印刷电路”是指在绝缘基体上通过任何印刷工艺(例如压花、电镀、蚀刻)或“薄膜电路”技术形成的电路,这些电路包括导体元件、触点或其他印刷元件(例如电感、电阻、电容器),这些元件单独或按照预定的图案相互连接,但不包括能够产生、整流、调制或放大电信号的元件(例如半导体元件)。“印刷电路”一词不包括与印刷工艺中得到的元件以外的元件组合的电路,也不包括单独的、分立的电阻、电容器或电感。但印刷电路可以装有非印刷连接元件。由在同一工艺过程中获得的无源和有源元件组成的薄膜或厚膜电路应归入税目 85.42。 9.- 就品目 85.36 而言,“光纤、光纤束或光缆用连接器”是指仅以机械方式将数字线路系统中的光纤端对端对齐的连接器。它们不执行其他功能,例如放大、再生或修改信号。 10.- 品目 85.37 不包括用于遥控电视接收器或其他电气设备的无线红外装置(品目 85.43)。 11.- 就品目 85.39 而言,“发光二极管(LED)光源”一词包括:
第八十五章
8.- 就税目 85.34 而言,“印刷电路”是指在绝缘基体上通过任何印刷工艺(例如压花、电镀、蚀刻)或“薄膜电路”技术形成的电路,这些电路包括导体元件、触点或其他印刷元件(例如电感、电阻、电容器),这些元件单独或按照预定的图案相互连接,但不包括能够产生、整流、调制或放大电信号的元件(例如半导体元件)。“印刷电路”一词不包括与印刷工艺中得到的元件以外的元件组合的电路,也不包括单独的、分立的电阻、电容器或电感。但印刷电路可以装有非印刷连接元件。由在同一工艺过程中获得的无源和有源元件组成的薄膜或厚膜电路应归入税目 85.42。 9.- 就品目 85.36 而言,“光纤、光纤束或光缆用连接器”是指仅以机械方式将数字线路系统中的光纤端对端对齐的连接器。它们不执行其他功能,例如放大、再生或修改信号。 10.- 品目 85.37 不包括用于遥控电视接收器或其他电气设备的无线红外装置(品目 85.43)。 11.- 就品目 85.39 而言,“发光二极管(LED)光源”一词包括:
ERS-ESD16-Final-lr.pdf - SPIE
光纤激光器引起了人们的想象,因为在短期内需要光束组合的功率高达 100kW,在未来则需要多 MW。它们近乎完美的光束质量、稳定性和多功能性,再加上增益介质的低成本,使它们成为相干组合多达 1000 个单独光纤放大器光束的理想选择。使用源自电信的光纤电路,我们可以设想全光纤激光电路和系统,它们坚固耐用、易于运输,并且可以直接管理热负荷。后一个属性来自大的表面积与体积比、光纤激光器的效率和二氧化硅的热稳定性。对于坚固的单个光纤激光发射器来说,几千瓦可能是实用可靠的最佳点,我们需要考虑光束组合以缩放功率,无论是空间、波长还是相干。相干光束组合(如在合成孔径雷达中)具有可操纵性和内置自适应光学的属性。然而,顾名思义,我们需要从每个光纤发射器以稳定的偏振光束输出相干的单频,这并不简单。本文将回顾高功率单频激光器的进展,以及该技术的预期局限性。本文还将回顾高功率脉冲光纤激光器的最新研究,以及光束组合的前景,以克服由于光纤束尺寸小而导致的脉冲能量限制

利用 fMRI 和全皮层模式光遗传学对全脑有效连接进行映射
6 这些作者对这项工作做出了同等贡献。 *通信地址:seonggikim@skku.edu 和 choim@snu.ac.kr 摘要 带有光遗传学神经操控的功能性磁共振成像 (fMRI) 是一个强大的工具,可以实现全脑有效功能网络的映射。为了灵活操控整个小鼠皮质的神经兴奋,我们首次通过光纤束将数字微镜设备产生的时空可编程光遗传学刺激整合到 MR 扫描仪中。这种方法在规划光刺激模式时提供了空间和时间的灵活性,并结合了单个小鼠的原位光学成像和细胞类型或电路特定的基因靶向。通过对基于图谱的皮质区域进行光遗传学刺激的 fMRI 获得的全脑有效连接通常与解剖学定义的轴突追踪数据一致,但会受到选择性作用于特定连接的麻醉剂类型的影响。 fMRI 与灵活的光遗传学相结合,通过高通量的全脑有效连接映射,开辟了一条研究同一动物脑功能状态动态变化的新途径。引言功能架构的无创映射对于研究与行为和病理变化相关的脑回路中具有因果关系的重要变化至关重要。为此,基于血流动力学的功能性磁共振成像 (fMRI) 已被广泛用作神经活动的替代品,通过不同解剖区域之间 fMRI 时间序列的同步程度,无创地映射功能连接 (FC)1,2。人类在任务和静息条件下的 FC 相似,可以用作预测个体认知行为的指纹 3,4 。然而,为了更好地在回路层面上理解 FC,需要有效连接 (EC),即一个大脑区域对另一个大脑区域的因果影响 5 。然而,fMRI 的时间分辨率有限(通常为 ~1 秒)和缓慢的血流动力学功能使得很难推断影响的方向。为了克服这一限制,可以利用明确区域中的神经元活动的调节来触发下游 fMRI 反应,从而让我们确定 EC 的方向和强度。

什么是软件开发
处理过时的软件已成为包括开源行业在内的各个行业的紧迫问题。本期为软件工程研究人员提供了机会,有机会适应传统的程序分析技术,以应对重构和现代化挑战。生成AI的进步已经为代码生成,翻译和错误修复以及其他任务开辟了新的途径。公司渴望探索可扩展的解决方案,以进行自动测试,重构和代码生成。本教程旨在提供旧软件现代化的概述,并在AI辅助软件和生成AI的兴起中强调了其意义。它将讨论由整体遗产代码和系统引起的行业挑战,引入建筑范式以现代化的老化软件,并突出需要注意的研究和工程问题。Daniel Thul等人,Xue Han等人,Daiki Kimura等人,Oytun Ulutan等人和Shivali Agarwal等人的研究论文。展示了解决旧软件现代化的重要性。这项工作有可能推动软件工程的创新,使IBM这样的公司能够开发最先进的解决方案。IBM研究在过去一年中在AI,量子计算,半导体和基本研究方面取得了长足的进步。该组织在全球12位实验室中的3,000名研究人员推动了科学领域的界限,并设想了以前似乎不可能的计算和扩展思想中的新可能性。我们的开发路线图将使我们走向这一未来。在过去的一年中,IBM研究在革新企业内的AI能力方面发挥了关键作用。就像AI在短时间内在我们的日常生活中深深地根深蒂固一样,世界上大多数有价值的业务数据仍然锁定在无法访问的格式中,例如PDF和电子表格。在2024年,IBM Research领导了该公司主要AI发行的指控,该公司旨在满足拥有数百万最终用户的企业。亮点之一是在五月的Think上推出了TruxStlab,这是一个开源项目,通过启用新知识和技能的协作添加来简化微调LLM。IBM Research和Red Hat之间的这种合作导致了Red Hat Enterprise Linux AI的功能强大的工具。TenchERTLAB脱颖而出,因为其能够允许全球社区创建和合并更改LLM的能力,而无需从头开始重新培训整个模型。此功能使全球人们更容易找到使用LLMS解决复杂问题的创新方法。此外,IBM Research还使用TerchandLab改善了其开源花岗岩模型,该模型随后于10月发布。在IBM Research的数据和模型工厂中设计和培训了新的花岗岩8B和2B模型。这些企业级模型的执行方式类似于较大的基础模型,但对于诸如抹布,分类,摘要,实体提取和工具使用的企业至关重要的任务成本的一小部分。在12月,IBM发布了其花岗岩3.1型号,每种型号的上下文长度为128K。经过超过12万亿代币的高质量数据培训,这些模型对其数据源具有完全透明的开源。花岗岩3.1 8b指示模型显着提高了其前身的性能改进,并在其同行中占据了拥抱面孔OpenLLM排行榜基准的平均得分之一。此外,IBM发布了一个新的嵌入模型系列,这些模型提供了12种语言的多语言支持,类似于它们的生成性。作为较早的Granite 3.0发射的一部分,Granite Guardian也是开源的。这使开发人员可以通过检查用户提示和LLM的响应来实施安全护栏,以了解社交偏见,仇恨言论,毒性,亵渎,暴力等风险。我们继续使用AI模型来推动界限,尤其是与抹布技术配对时。这种组合使我们能够评估背景相关性,回答相关性和扎根。我们的最新花岗岩3.1型号是8B强大的巨头,可提供无与伦比的风险和损害检测功能。我们还升级了我们的花岗岩时间序列模型,该模型以十倍的利润优于更大的模型。这些进步对于试图根据历史数据准确预测未来事件的企业尤为重要。与传统的LLM不同,我们的花岗岩TTM(TinyTimemixers)系列提供紧凑而高性能的时间序列型号,现在可以在Beta版本的Watsonx.ai的时间表预测API和SDK的Beta版本中提供。这个新的8B代码模型还具有对代理功能的支持。我们相信,我们的开源社区在这些模型中看到了价值,迄今为止,拥抱面孔的下载量超过500万。我们的下一代代码助理,由花岗岩代码模型提供支持,为C,C ++,GO,Java和Python等语言提供通用编码帮助。除了我们的内部软件开发管道改进外,在某些情况下增强了90%的增长,Granite代码模型现在还通过Instana,Watsonx Struckestrate和Maximo等产品中的产品,业务和行业4.0自动化为新的用例,为新的用例提供了动力。我们的花岗岩型号现在可以在包括Ollama,LM Studio,AWS,Nvidia,Google Vertex,Samsung等的各种平台上使用。建立在花岗岩3系的成功基础上,我们正在努力实现一个未来,AI代理可以通过称为Bee的开源框架可以轻松地解决业务需求。这使代理商可以快速开发业务应用程序。与美国国家航空航天局合作开发的气候和天气模式,用于跟踪重大的环境问题,例如西班牙的洪水破坏,亚马逊森林砍伐以及美国城市的热岛。我们很自豪地庆祝由IBM和META共同创立的AI联盟一年,旨在推动开放和负责的AI开发。该计划已发展为23个国家 /地区的140名成员,为负责任的模型,AI硬件和安全计划组成工作组。随着对AI的需求的增长,很明显,传统的CPU和GPU正在努力与这些模型的复杂性保持同步。我们需要创建从一开始设计的新设备,以有效地处理AI需求。IBM在半导体和基础设施中揭示了2024年在半导体和基础设施研究团队中发生的一些重大突破,重点是规模。8月,IBM揭开了Spyre,这是一种新的AI ACELERATOR芯片,用于子孙后代的Z和Power Systems,灵感来自AIU原型设计和Telum Chip的工作。这一突破是在意识到AI工作流程需要极低的AI推断后的突破。spyre具有32个单独的加速器芯,并包含使用5 nm节点工艺技术生产的14英里电线连接的256亿晶体管。芯片设计为聚集在一起,为单个IBM Z系统添加了更多的加速器核。与Spyre一起,企业可以在Z上部署尖端的AI软件,同时受益于IBM Z的安全性和可靠性。IBMResearch也一直在探索更有效地服务模型的方法。去年,该团队推出了其脑启发的AIU Northpole芯片,该芯片将记忆和加工单元共同取消,拆除了Von Neumann瓶颈。今年,在Northpole的硬件研究人员与AI研究人员之间的合作中,该团队使用Northpole用于生成模型创建了一个新的研究系统。该团队的潜伏期低于1毫秒的延迟,比下一个节能的GPU快了近47倍,而能量却减少了近73倍。另一个重大突破是在共包装光学领域的。此设备可以在硅芯片边缘的高密度光纤束,从而可以通过聚合物纤维进行直接通信。IBM Research Semiconductors部门中的一个团队生产了世界上第一个成功的聚合物光学波导,将光学的带宽带到了芯片边缘。该团队证明了光通道50微米的音高的可行性,这比以前的设计尺寸减少了80%。IBM研究人员在芯片设计和制造方面取得了重大突破。 他们开发了一种使用250微米螺距的新设备,该设备可能会缩小至20-25微米,从而大大增加带宽。 这项创新可能会导致AI模型的更快培训时间,并有可能节省能源,等同于每年为5,000个美国房屋供电。 此外,IBM的团队在缩小晶体管和使用Rapidus技术的2纳米过程设备方面取得了进步。 他们通过2纳米工艺成功构建了芯片,可以进行复杂的计算而不会过多的能耗。 这些突破增强了纳米片多VT技术,以替代当前的FinFET设备。 团队还使用高NA EUV系统从事EUV光刻,这使设计高性能逻辑设备可以扩展纳米片时代,并使未来垂直堆叠的晶体管超过1 nm节点。 IBM已经证明了降至21 nm螺距的线条的金属化,从而使铜达马斯斯互连的集成能够继续进行。 这些创新不仅是研究的努力;它们将变成可以大规模部署以解决实际业务问题的产品。IBM研究人员在芯片设计和制造方面取得了重大突破。他们开发了一种使用250微米螺距的新设备,该设备可能会缩小至20-25微米,从而大大增加带宽。这项创新可能会导致AI模型的更快培训时间,并有可能节省能源,等同于每年为5,000个美国房屋供电。此外,IBM的团队在缩小晶体管和使用Rapidus技术的2纳米过程设备方面取得了进步。他们通过2纳米工艺成功构建了芯片,可以进行复杂的计算而不会过多的能耗。这些突破增强了纳米片多VT技术,以替代当前的FinFET设备。团队还使用高NA EUV系统从事EUV光刻,这使设计高性能逻辑设备可以扩展纳米片时代,并使未来垂直堆叠的晶体管超过1 nm节点。IBM已经证明了降至21 nm螺距的线条的金属化,从而使铜达马斯斯互连的集成能够继续进行。这些创新不仅是研究的努力;它们将变成可以大规模部署以解决实际业务问题的产品。例如,IBM Spyre已经可用,将是下一代IBM Power 11的组成部分。AIU Northpole和共包装的光学设备在加拿大Bromont的IBM设施进行了测试和硬化。IBM量子通过整合量子和经典系统来解决复杂问题,从而加速其对混合计算的愿景。今年,该公司在推进其可扩展故障量量子计算机的路线图方面取得了长足的进步。在量子开发人员会议上,IBM展示了其进度,包括从高达5,000台门的运营中获得了苍鹭量子电路的精确结果。揭幕了一种新的,改进的苍鹭芯片,拥有156吨和出色的性能,错误率下降到8x10^-4。此外,IBM在创新方面取得了重大进步,包括使用Crossbill和L-COUPLER的M耦合器与火烈鸟的开发。这些突破使量子计算机更接近可扩展性和容忍性。此外,Qiskit V1.0是作为稳定版本发布的,巩固了其作为世界上最出色的量子软件开发套件的位置。此版本提供了改进的稳定性,并为Qiskit的60万开发人员提供了更长的支持周期。此外,还编译了一个名为Benchpress的基准集合,以准确演示Qiskit的性能。在针对其他量子软件(包括TKET,BQSKIT和CIRQ)的基准测试测试中,Qiskit在性能方面出现了明确的赢家,完成了比任何其他量子SDK的测试。IBM对创新的承诺可以追溯到80年前的成立。平均而言,在移动电路时,Qiskit的速度比TKET少54%。我们的软件工具集<div> Qiskit已经超越了性能SDK,以支持运行实用程序尺度量子工作负载的整个过程。这包括编写代码,后处理结果以及两者之间的所有内容。该工具集现在涵盖执行大规模工作负载所需的开源SDK和软件中间件。Qiskit Transpiler服务,更新的Qiskit Runtime Service,QISKIT AI Code Assistan Service,Qiskit Serverless和Qiskit功能等新功能使用户能够在更高的抽象级别访问高性能的量子硬件和软件。Qiskit功能,特别是将量子计算带给更广泛的受众群体的潜力。这是一项编程服务,允许用户在导入功能目录并传递其API令牌后,在IBM量子处理器和IBM Cloud上运行工作负载。该服务应用错误抑制和缓解措施,然后返回结果。通过结合软件和硬件突破,我们制作了以量子为中心的超级计算的第一个真实演示。我们与Riken合作发表了一篇论文,将此范式定义为超级计算,可以优化跨量子计算机和高级经典计算簇的工作。在我们的实验中,我们使用了多达6,400个fugaku超级计算机的节点,以帮助IBM Heron QPU模拟分子氮和铁硫簇。我们有信心,如果我们与古典HPC社区合作,我们可以在未来两年内实现量子优势。由于以量子为中心的超级计算出现,我们设想在一些最难的计算任务中协助经典计算机(反之亦然)的量子计算机。当前的加密方法取决于计算机将大数字分为主要因素的困难,随着数字的增长,这变得越来越具有挑战性。计算机科学家认为,研究人员已经证明,一台复杂的量子计算机可以通过应用Shor的算法在几个小时内破解RSA-2048加密,这对于计算机对于能够将大于2048位的数字的计算值至关重要。为了解决这一问题,IBM Research开发了三种新的数字签名算法-ML-KEM,ML-DSA和SLH-DSA,它们已被NIST接受竞争。为了确保平稳过渡到后量子后时代,IBM量子安全团队创建了一个用于网络弹性的路线图。这涉及了解组织的加密格局,确定需要更换的领域以及分析依赖性。企业可以使用诸如IBM量子安全探险家之类的工具来发现加密文物,生成密码材料清单(CBOM)并分析相关漏洞。IBM还为几项国家级计划做出了贡献,包括日本的Rapidus项目,该计划旨在使用芯片和高级包装以及AI驱动的Fab Automation开发2 NM芯片。此外,IBM与几个国家合作,以帮助他们确保其计算未来。在瑞士,IBM与Phoenix Technologies合作,在其位置安装了端到端的云AI超级计算机。该系统能够从数十个gpus扩展到数十个GPU,并具有IBM突破,例如基于IBM存储量表的灵活的基于RDMA的网络和高性能存储系统。使用OpenShift容器平台和OpenShift AI构建了云本地AI平台,可根据需要提供对WATSONX.AI的访问。IBM设置为全球主权AI Cloud Solutions的动力,从Kvant AI开始,该解决方案旨在提供特定于行业的AI应用程序。该公司还将通过投资其Bromont设施来加强与加拿大和魁北克政府的合作伙伴关系,从而巩固北美芯片供应链的未来。此外,IBM半导体研究导致了纳米片技术和2 nm节点等突破,并且新的NSTC EUV加速器将位于Albany Nanotech综合体。IBM还通过开设其在欧洲的第一个量子数据中心并与Riken合作安装IBM量子系统两个,从而在全球扩展量子计算。该公司还将IBM系统带到韩国和法国,同时与西班牙,沙特阿拉伯和肯尼亚等政府合作开发特定语言的AI模型并监视造林工作。托马斯·沃森(Thomas Watson)认为,从制表机,尺度和打孔时钟的早期,投资研究的价值。IBM继续发现新的想法和设计工具,以满足不断变化的行业需求,从而巩固了其作为计算领域的领导者的地位。 这个开创性的研究机构致力于推动现代科学的界限并取得渐进的进步。IBM继续发现新的想法和设计工具,以满足不断变化的行业需求,从而巩固了其作为计算领域的领导者的地位。这个开创性的研究机构致力于推动现代科学的界限并取得渐进的进步。IBM研究:八十年前的科学突破的遗产,哥伦比亚大学教授华莱士·埃克特(Wallace Eckert)领导了沃森科学计算实验室IBM Research成为前身的建立。在1956年,IBM建立了一个专门的研究部门,到本世纪末,他们需要更多的空间来探索迅速发展的计算世界。我们通过在我们的思想实验室中构建创新的解决方案来启动我们的旅程,以塑造计算的未来。在这里,研究人员与来自不同背景的专业人员合作,以解决看似不可能的项目。我们的内部工具(如花岗岩模型)被用来增强我们的产品,而代理框架为Qiskit供电代理。最近的合作导致了加速的发现,回应了托马斯·沃森(Thomas Watson)80年前的开拓精神。我们应对未来80年的挑战时,下一章的创新就在未来。