机构名称:
¥ 3.0
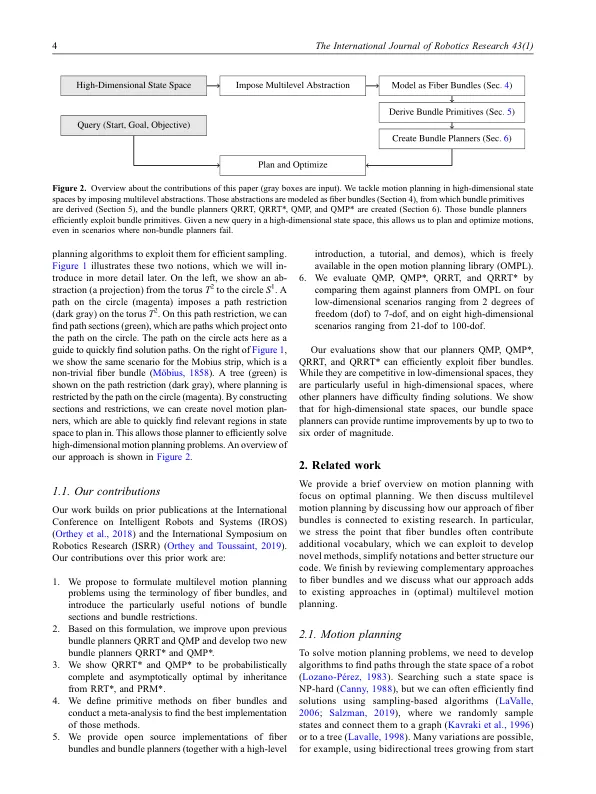
抽象的高维运动计划问题通常可以通过使用多级抽象来更快地解决。虽然有多种方式正式捕获多级抽象,但我们以纤维束的方式制定了它们。纤维束基本上使用本地产品空间来描述状态空间的低维投影,这使我们能够根据捆绑限制和捆绑截面来简化和得出新颖的算法。鉴于这种结构和相应的可允许约束函数,我们为高维状态空间开发了高度有效和基于最佳采样的运动计划方法。这些方法通过使用捆绑图来利用捆绑的结构。这些原语用于创建新颖的捆绑计划者,快速探索商的空间树(QRRT*)和商空间路线图计划者(QMP*)。两个计划者均显示出概率完整且几乎渐近地最佳。为了评估我们的捆绑计划者,我们将它们与四个低维情况的基准测试和基于经典的计划者进行了比较,以及八个高维场景,范围从21至100度的自由度不等,包括多个机器人和非健康的约束。我们的发现显示了多达2到6个数量级的改进,并强调了多级运动计划者的效率以及使用Fier Bundles的术语来利用多级抽象的有益。
IDB-A多级运动计划:光纤束配方
主要关键词




相关文件推荐