XiaoMi-AI文件搜索系统
World File Search System全向

航空电子设备健康监测可信度评估
本文提供了一种使用自动测试设备 (ATE) 评估下机航空电子系统健康监测可信度的方法。指标包括假阳性、假阴性、真阳性和真阴性的概率。我们首次考虑了刺激信号源 (SSS) 的不稳定性、测量通道误差的随机和系统分量以及系统本身的可靠性特性。我们考虑了永久性故障和间歇性故障的指数分布的具体情况,并推导出计算可信度指标的公式。数值计算说明了正确和错误决策的概率如何取决于精度参数。我们表明,当刺激信号的标准差增加时,假阳性和假阴性的概率增加得比真阳性和真阴性的概率下降得快得多。对于甚高频全向测距 (VOR) 接收器,我们证明即使刺激信号源产生的随机误差为零,假阳性和假阴性的概率也不为零。

广告 2 lfth 数据 01 hyeres le palyvestre - dircam
初始出发:沿轴线以 11.5%(1)的速度爬升至 60(55),然后以 5% 的速度爬升至 1000(995),然后遵循 SID 轨迹。 2 NM HYE 之前禁止转弯(1)最具惩罚性的障碍物:位于 DER 94 米处、轴线左侧 130 米处、海拔 56 英尺的树。抽象:高 32 英尺的树,位于距离 DER 16 米处,距离 DER 左侧 90 米处。全向出发:沿轴线以 11.5%(2)的速度爬升至 60(55),然后以 5% 的速度爬升至 1200(1195),然后直接航线上升到安全高度。 (2) 最具惩罚性的障碍物:位于 DER 86 米处、轴线右侧 90 米处、海拔 61 英尺的树。摘要:高 56 英尺的树,距离 DER 55 米,位于 DER 左侧 111 米处。

线性速度传感器
LVS-101和LVS-2011速度传感器已设计用于旋转机器的低频振动监测应用。更具体地说,传感器满足非常低速水电机的特殊低频要求。LVS传感器根据电动力原理运行,用于测量机器的轴承绝对振动。传感器的传感元件是围绕永久磁体移动的高精度弹簧支撑的线圈,该电压与振动速度成正比。通过设计,传感器具有出色的灵敏度和线性,降低到非常低的振动水平。内置电子设备允许传感器准确监视振动频率降低到0.5Hz。可以使用传感器的水平和垂直模型,有关全向传感器,请参见LVS-301。传感器提供了两个电压输出与振动速度成正比的电压输出:•与缓冲的非线性信号相对应的原始输出•低频补偿的动态振动速度信号,以监测到
ETR 169 - 卫星地面站和系统 (SES) - ETSI
ACTE 终端设备审批委员会 BSS 广播卫星服务 CTR 通用技术法规 eirp 等效全向辐射功率 EMC 电磁兼容性 ERC 欧洲无线电通信委员会 ERMES 欧洲无线电信息系统 FSS 固定卫星服务 GSM 全球移动通信系统 ISDN 综合业务数字网 ITU-R 国际电信联盟 - 无线电通信 LMES 陆地移动地球站 LNB 低噪声块下变频器 LO 本振 NTP 网络终端点 ONP 开放网络配置 PBX 专用交换机 RES 无线电设备和系统 S-PCN 卫星个人通信网络 SES 卫星地球站(及系统;自 1993 年 6 月起) SNG 卫星新闻采集可移动地球站 TBR 法规技术基础 TC 技术委员会 TES 可移动地球站 TRAC 技术法规应用委员会 TTE 电信终端设备 TVRO 电视接收专用 UMTS 通用移动通信系统 VSAT 甚小孔径终端

安全管理手册 (SMM)
LOFT 航线飞行训练 LOSA 航线运行安全审计 m 米 MDA 最低下降高度 MEL 最低设备清单 MOR 强制性事件报告 MRM 维护资源管理 NM 海里 OJT 在职培训 PC 个人电脑 QA 质量保证 QC 质量控制 QMS 质量管理体系 RVSM 缩小垂直间隔最低标准 SA 安全保证 SAG 安全行动组 SARPs 标准和建议措施(国际民航组织) SDCPS 安全数据收集和处理系统 SHEL 软件/硬件/环境/动态软件 SMM 安全管理手册 SMS 安全管理系统 SMSM 安全管理系统手册 SOPs 标准操作程序 SRB 安全审查委员会 SRM 安全风险管理 SSP 国家安全计划 TLH 最高级别危险 TRM 团队资源管理 USOAP 普遍安全监督审计计划(国际民航组织) VIP 非常重要的人物 VMC 目视气象条件 VOR 甚高频全向射程 _____________________
ES 202 706-1-V1.7.1-环境工程(EE)
AAS 有源天线系统 AAU 有源天线单元 AC 交流电 BCCH 广播控制信道 BH 忙时 BS 基站 BSC 基站控制器 BTS 基站收发站 CA 载波聚合 CATR 紧凑型天线测试范围 CCE 控制信道元素 CCH 公共信道 CCPCH 公共控制物理信道 CP 循环前缀 CPICH 公共导频信道 CS 电路交换 DC 直流 DL 下行链路 DPCH 专用物理信道 DUT 被测设备 EDGE 增强数据速率 GSM 演进 EIRP 等效全向辐射功率 EPRE 每个资源元素的发射功率 FDD 频分双工 FL 满载 FR1 频率范围 1(450 - 6 000 MHz),为 NR 定义 FR2 频率范围 2(24 250 - 52 600 MHz),为 NR 定义 GERAN GSM/EDGE 无线接入网 GP 保护期 GSM 全球移动通信系统 GUM 指南测量不确定度的表达
石墨烯 - 电解质双层的恒定化学势 - Quantum机械 - 分子动力学模拟
摘要:双人操作对于它在与环境交互时为机器人提供增加功能的潜力以及扩大可用的操作动作的数量而有价值。但是,要使机器人执行双字操作,系统必须具有一个强大的控制框架,以对每个子系统进行定位和生成轨迹和命令,以允许成功进行合作操作以及对每个单个子系统的足够控制。提出的方法建议使用多个通过使用光学跟踪定位方法充当单个双层操作系统的多个移动操纵器平台。框架的性能取决于本地化的准确性。由于命令主要是高级的,因此可以在此框架内使用移动操纵器和固定操纵器的任何数字和组合。我们使用两个不同的全向移动操纵器在Pybullet仿真环境中进行测试来证明该系统的功能,以及使用两个四倍体操纵器的真实实验。
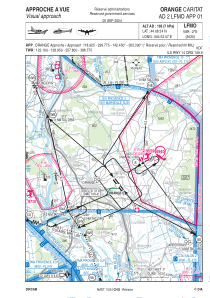
ORANGE CARITAT AD 2 LFMO APP 01 APPROCHE A VUE 视觉进近
在以下条件下,无需激活 CAM V 或 VFR(仅限 AD 交通)中的 ORANGE 空域,即可执行无 CTR DEP 或 ARR 的程序:HEL:VIS > 800 米(或 ACFT:VIS > 1500 米)或飞行 30 秒,在云层之外可看见地面 跑道 32 环路:- DEP 在轴线 2000' QFE(2200' QNH)处,然后全向追逐 - ARR:在 CTR 横向限制前下降到 1500' QFE:- 从西边,经 Pont Saint Esprit 直接顺风左手 32 - 从东边,经 Carpentras 垂直报告 TACAN ORG 避开 CTR AVIGNON 加入顺风左手 32 环路 RWY 14:- DEP 避开 CTR AVIGNON 或直接顺风左手 32 经过 500' 爬升至 2000' QFE (2200' QNH) - ARR: 在 CTR 横向界限前下降至 1500' QFE: - 从西部,经 Pont Saint Esprit 直达
埃及国家频率分配表
术语 定义 ADSE 机场地面探测设备 AID 自动识别 AIS 自动识别系统 AM 调幅 附录 17 《无线电规则》附录 17:水上移动业务高频频段的频率和信道安排 附录 18 《无线电规则》附录 18:甚高频水上移动频段发射频率表 附录 30 《无线电规则》附录 30:11.7-12.2 GHz(3 区)、11.7-12.5 GHz(1 区)和 12.2-12.7 GHz(2 区)频段卫星广播业务所有业务及相关规划和清单的规定 附录 30A 《无线电规则》附录 30A:卫星广播业务馈线链路的规定及相关规划和清单(1 区 11.7-12.5 GHz,12.2-12.7 GHz,在 2 区为 11.7-12.2 GHz,在 1 区和 3 区为 14.5-14.8 GHz 和 17.3-18.1 GHz 频段,在 2 区为 17.3-17.8 GHz 频段 附录 30B 《无线电规则》附录 30B:4 500-4 800 MHz、6 725-7 025 MHz、10.70-10.95 GHz、11.20-11.45 GHz 和 12.75-13.25 GHz 频段的卫星固定业务的规定和相关规划 附录 4 《无线电规则》附录 4:用于应用第 III 章程序的综合清单和特性表格 附录 5 《无线电规则》附录 5:确定将与之进行协调或达成协议的主管部门根据第 9 条的规定寻求的利益 第 12 条 《无线电规则》第 12 条:对分配给广播业务的 5 900 kHz 至 26 100 kHz 之间的高频段进行季节性规划 第 23 条 《无线电规则》第 23 条:广播业务 第 26 条 《无线电规则》第 26 条:标准频率和时间信号业务 第 31 条 《无线电规则》第 31 条:全球海上遇险和安全系统(GMDSS)的频率 第 5 条 《无线电规则》第 5 条:频率分配 BFWA 宽带固定无线接入 BSS 卫星广播业务 COSPAS 遇险船舶搜寻空间系统 DME 测距设备 DSC 数字选择呼叫 EIRP 等效同位素辐射功率 - 供给天线的功率与相对于全向天线在给定方向上的天线增益的乘积(绝对增益或全向增益) EESS 地球探测卫星业务 EIRP 有效全向辐射功率 ENG 电子新闻采集 EPIRB 紧急位置指示无线电信标 FM 频率调制 FSS 固定-卫星服务
AIP 葡萄牙 LPPT AD 2
所有停机位均设有 ID 标志和标记;滑行道引导线。可应要求提供跟随引导。停机坪 10、11、12、14 和 60 设有 ASMGL - 飞机停机位机动引导灯,旨在用于 LVO 和 NVO 运行条件。当飞机位于距停机位引导线 60 米处时,上述停机位的进站航班将看到黄色序列和路面上的全向闪光灯亮起,此时 ASMGL 灯将从距停机位入口 45 米处开始变为黄色,直到 APIS 上发出启动输入。所有未安装飞机停放和信息系统 (APIS) 的停机位均可编组。 APIS 适用于位于 10、11、12、14、20、22、30、40、41、42、50 和 80 号停机坪的所有停机位。APIS 显示“OK”是系统状态信息,而不是停机位许可确认信息。当 APIS 显示“OK”信息时,飞行员不应认为飞机安全区 (ASA) 内没有障碍物。所有 APIS 单元的描述